
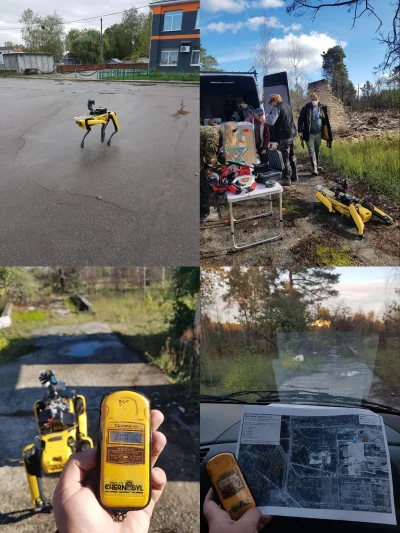
Śmieszny piesek od Boston Dynamics na spacerze po terenie elektrowni i pod nowym sarkofagiem ( ͡° ͜ʖ ͡°)
#czarnobyl #technologia #bostondynamics #smiesznypiesek
#czarnobyl #technologia #bostondynamics #smiesznypiesek
Wszystko
Najnowsze
Archiwum

Boston Dynamics
z
Hyundai przejmuje firmę Boston Dynamics za blisko miliard dolarów. Dotychczasowym właścicielem był japoński SoftBank. Rozmowy związane z kupnem Boston Dynamics prowadzone były od listopada. Najnowsze raporty sugerują, że doczekały się sfinalizowania.
z
źródło: comment_1603272135AaCt7dSVZo8gHGtzh6roIX.jpg
Pobierz
całość za jedyne 75 000$
z

Wspólny aerobik na świeżym powietrzu.
z
Wspólny taniec psiego robota od Boston Dynamics, Spota i SoftBank Robotics, Peppera na stadionie.
z
za jedyne $75 000 ( ͡° ͜ʖ ͡°) Przyszłość jest straszna...
zKomentarz usunięty przez autora


Odkryj najbliższą przyszłość SpotMinis, gdzie wszystkie inne oznaki życia zostały usunięte, zbierają to, co można znaleźć na nie nadających się do zamieszkania pustkowiach, które kiedyś nazywaliśmy Ziemią.
z
Kup pan Spota za jedyne $74 500, można też dobrać do niego moduły na sklepie internetowym Boston Dynamics.
z
Spot, the nimble robot that climbs stairs and traverses rough terrain with unprecedented ease, is now available for purchase to businesses in the U.S. Use Sp...
z
Boston Dynamics to amerykańska firma zajmująca się projektowaniem inżynierii i robotyki, założona w 1992 roku jako wydzielona z Massachusetts Institute of Technology. Firma jest pionierem w dziedzinie robotyki i należy do najbardziej zaawansowanych w swojej dziedzinie.
z
Boston Dynamics planuje wykorzystanie robo-psów w życiu codziennym, na przykład na farmie.
z
Spot, to czteronożny robot rozwijany przez firmę Boston Dynamics już od kilku lat. Dotychczas prezentowano głównie jego zdolności manualne – chociażby umiejętność pokonywania skomplikowanych przeszkód. Teraz przyszedł czas na prezentację zupełnie nowych możliwości.
z
I nie tylko. Przedstawiciele Rocos twierdzą bowiem, że mogą one przejąć o wiele więcej obowiązków. Od monitorowania upraw w czasie rzeczywistym (coraz bardziej popularna rzecz jeśli chodzi o tzw. gospodarstwa nowoczesne) aż do zautomatyzowanego zbierania plonów.
z
I weź go spotkaj w nocy xD
z








{kind=link}
{kind=link}
#chiny #robotyka #bostondynamics #smiesznypiesek
źródło: comment_1608989530DDC43qKaY9iYI4HiXbEIVk.jpg
PobierzCo chwilę to piszesz a filmów jak nie było tak nie ma