#bostondynamics #heheszki #robotyka
Wszystko
Najnowsze
Archiwum

BOYAR
via Android
konto usunięte via Wykop Mobilny (Android)
@BOYAR: wyglada jak prawdziwe
BOYAR
via Android@bombilibajbaj ryzyko jest spore, film to fejk od Bosstown ale w jakiś sposób może pokazywać gdzie Boston może skończyć ze swoimi projektami
Bosstown Dynamics

Bawimy sie bronią...
z- 84
- #
- #
- #
- #
- #

https://www.wykop.pl/link/5158223/poczatki-boston-dynamics-%CA%96/
ma ktos ten filmik z tego wykopaliska ? bo usuneli ( ͡° ͜ʖ ͡°)
#robotyka #bostondynamics
ma ktos ten filmik z tego wykopaliska ? bo usuneli ( ͡° ͜ʖ ͡°)
#robotyka #bostondynamics

@koniarz: pewnie tam był leglab. Niby pokraki, ale pomyśl, ze to lata 1980-1995
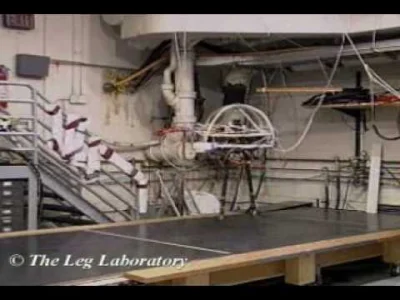
@Felonious_Gru: dzieki za odpowiedz, neistety to nie to. To byl taki maly robocik co robil fikolki na drazku i wyladowal telemarkiem praktycznie ( ͡° ͜ʖ ͡°)
Boston Dynamics robot niosący pudełko

Digit, dwunożny robot podobny do robota Atlas firmy Boston Dynamics, niosący pudełko.
z- 25
- #
- #
- #
- #

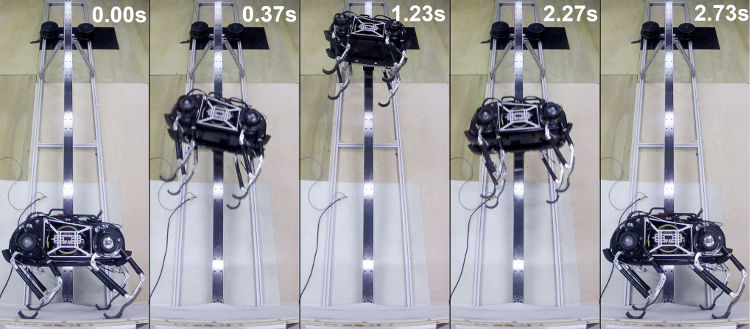
Czas na testy ruchów złożonych i odwrotnej kinematyki.
Muzyka dla śledzących #spacex
#robotyka #elektronika #diy #bostondynamics
Muzyka dla śledzących #spacex
#robotyka #elektronika #diy #bostondynamics





@defoxe: Masz rację. Chciałem chyba podzielić się swoją radością z tego, że coś się rusza. Sam lubię czytać takie wypociny - przynajmniej jeśli to, co ktoś tworzy nie jest totalnie pozbawione sensu. Doskwiera mi, że z tego co wiem, dość niewiele się dzieje w kwestiach rozwoju hobbystycznej robotyki w regonie łódzkim, może poza kołem zainteresowań przy politechnice.
Kilkanaście lat temu w moim rodzinnym mieście było koło modelarskie, później nastąpił wysyp
Kilkanaście lat temu w moim rodzinnym mieście było koło modelarskie, później nastąpił wysyp

@mathmed tak trzymaj mireczku, fajnie że coś robisz po pracy :)


Spot od Boston Dynamics ukończony. Robot trafia do sprzedaży

Boston Dynamics, ulubiony startup każdego fana robotyki, wprowadza pierwszą maszynę do komercyjnego użytku. Do sprzedaży trafia popularny Spot, którego rozwój mogliśmy podziwiać już od 2015 roku. Przez lata robopies zyskał wielu entuzjastów, a...
z- 0
- #
- #
- #
- #
- #
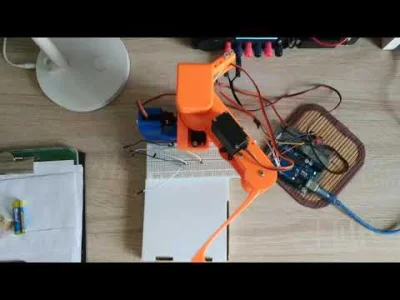
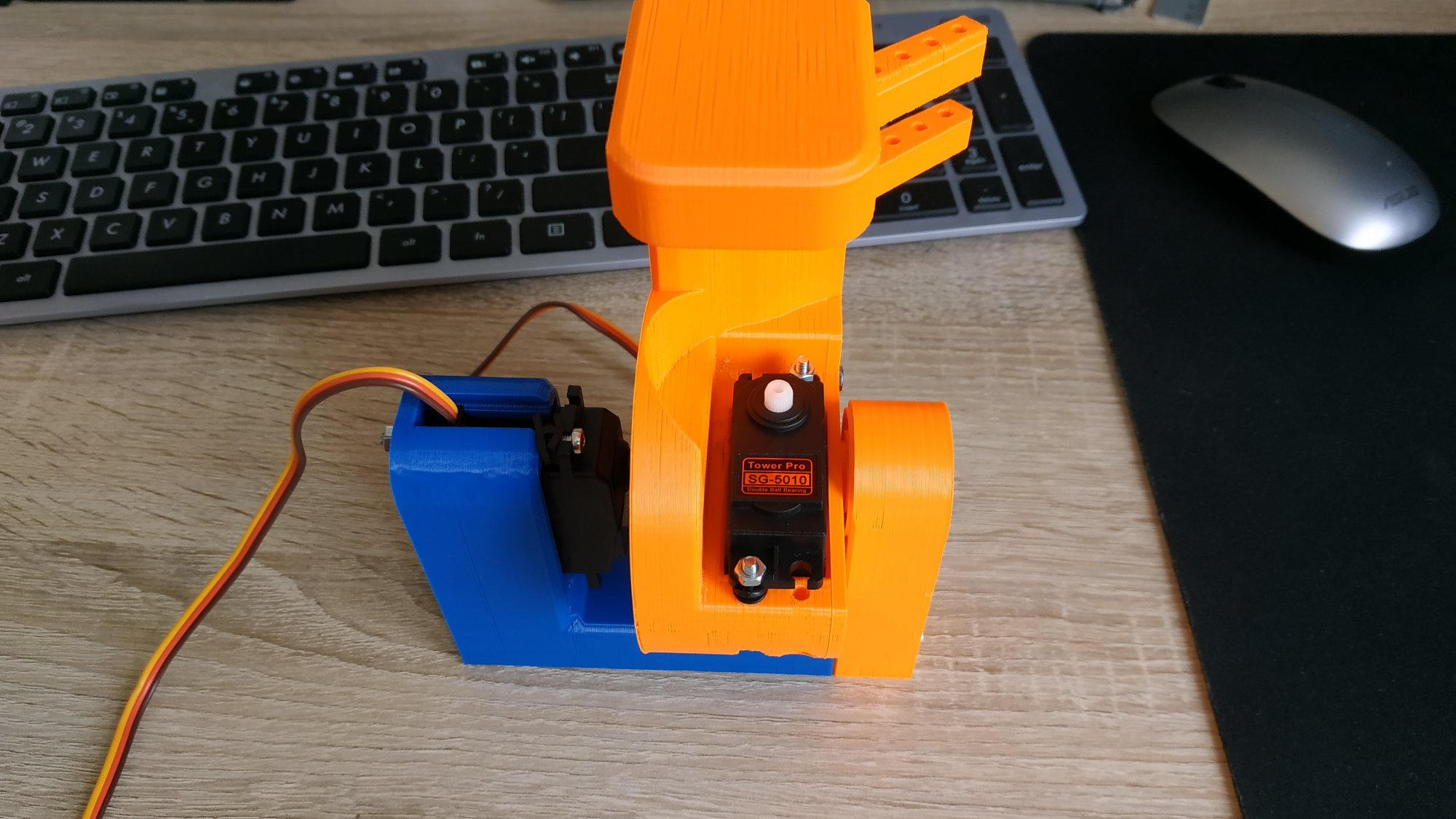
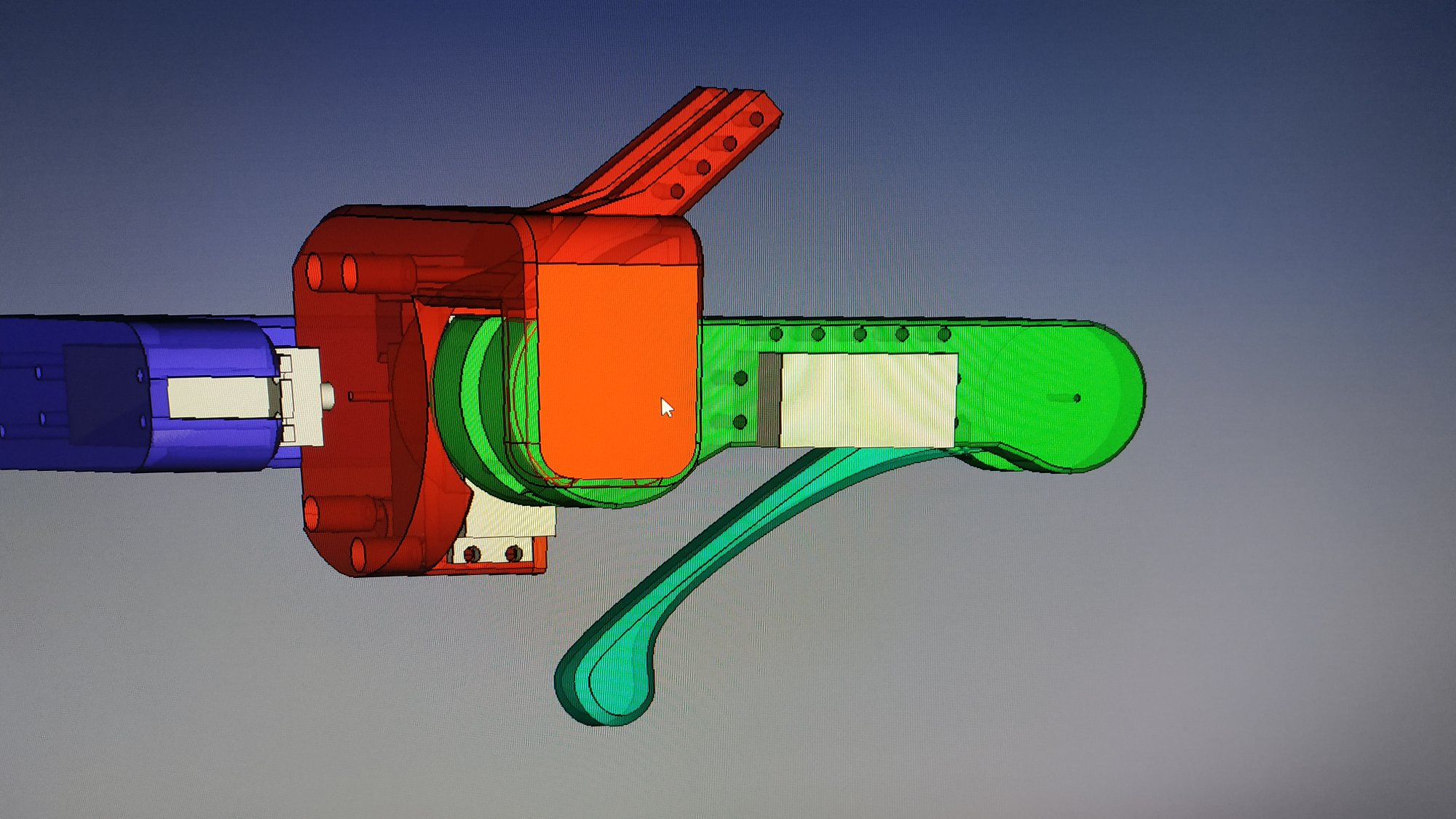
Dalszy ciąg montażu. Wersja testowa jest trochę przewymiarowana, ale będę eksperymentować z przeniesieniem napędu na podudzie/przedramię. Docelowo wszystko będzie nieco odchudzone. Masa elementów 3d i śrub wynosi mniej więcej tyle co serwomechanizmy - w sumie około 200g.
Mam obawy czy te serwa dadzą sobie radę, ale zaprojektowałem miejsca na sprężyny odciążające serwa przy pewnych kątach.
#robotyka #elektronika #diy #bostondynamics
Jeśli macie pomysły lub doświadczenia
Mam obawy czy te serwa dadzą sobie radę, ale zaprojektowałem miejsca na sprężyny odciążające serwa przy pewnych kątach.
#robotyka #elektronika #diy #bostondynamics
Jeśli macie pomysły lub doświadczenia

źródło: comment_5vL6eocIhkI1YluTMJYdyB6DBzQxB4n6.jpg
Pobierz@Polanin Muszę ograniczać masę całości, dlatego sprężyny. W necie są konstrukcje na cięgnach i sprężynach. Całość jest dzięki temu lekka i elastyczna. Niestety wymaga to zewnętrznego czujnika rzeczywistego położenia każdego elementu kończyny. U mnie czujnik jest wewnątrz serwomechanizmu.
Z jakiego materiału drukujesz? Abs? Pla?



Codzienny progres - projektowanie kończyny robota :-)
Trzeba jeszcze kilka rzeczy poprawić i pora drukować.
#robotyka #elektronika #diy #bostondynamics
Trzeba jeszcze kilka rzeczy poprawić i pora drukować.
#robotyka #elektronika #diy #bostondynamics
źródło: comment_gOZ6FCgXObBoWlnLGgWRmD4AYbYwVmwP.jpg
Pobierz
@majsterV2 Przydatne, ale do moich zastosowań za mało dokładne.
Spot od Boston Dynamics wkrótce w sprzedaży

Do 5.7km/h, 90min na baterii, 14kg udźwigu, IP54, API do programowania własnych zachowań www.BostonDynamics.com/Spot
z- 192
- #
- #
- #
- #
- #
Parkour Atlasa. BostonDynamics w akcji.

Nowe wideo od BostonDynamics.
z- 215
- #
- #
- #
- #
- #
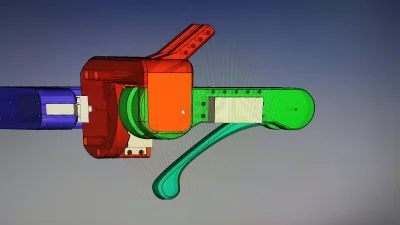
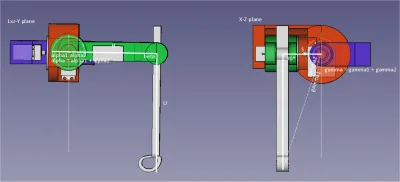
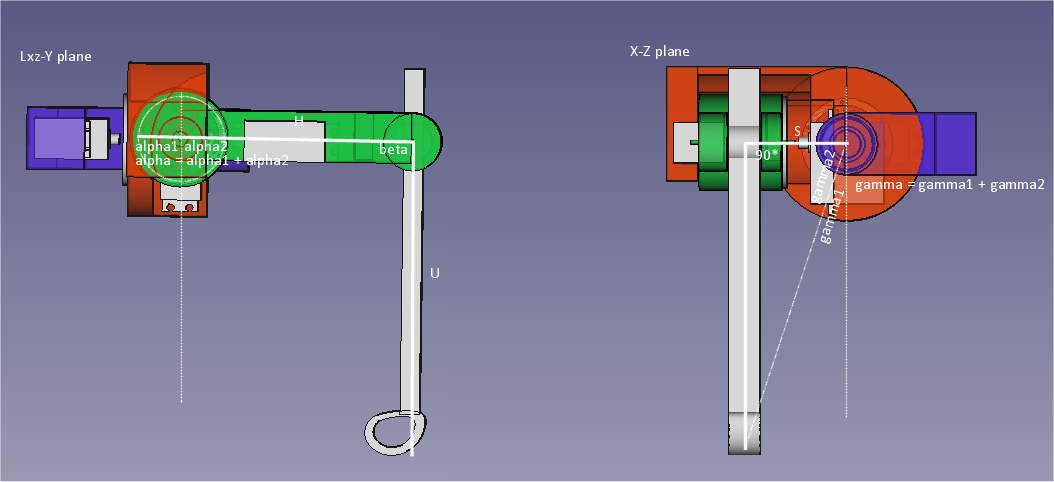
Napisałem sobie kinematykę odwrotną do zaprojektowanej wcześniej kończyny robota.
Kończyna zaprojektowana we FreeCAD trochę ala Spot mini, tylko mniejsza - na serwach standard.
#robotyka #elektronika #bostondynamics
Kończyna zaprojektowana we FreeCAD trochę ala Spot mini, tylko mniejsza - na serwach standard.
#robotyka #elektronika #bostondynamics
źródło: comment_sMhLJqpV9GsNQzggU3iYl0z7vnfQvaJN.jpg
PobierzCzy ktoś na Wykopie interesuje się robotyką i mógłby pokazać swoje projekty robotów?
Nie znalazłem w polskim necie projektu na miarę Spot Mini od Boston Dynamics ani żadnego podobnego czworonożnego robota. Za to jest kilka podobnych projektów na uczelniach w Azji i US.
Czy u nas niczego takiego się nie robi? Myślicie, że taki projekt jest do zrobienia w ramach DIY (myślę o czymś mniejszym na raspberry pi i serwach modelarskich typu
Nie znalazłem w polskim necie projektu na miarę Spot Mini od Boston Dynamics ani żadnego podobnego czworonożnego robota. Za to jest kilka podobnych projektów na uczelniach w Azji i US.
Czy u nas niczego takiego się nie robi? Myślicie, że taki projekt jest do zrobienia w ramach DIY (myślę o czymś mniejszym na raspberry pi i serwach modelarskich typu

@mathmed: "czesciowo dokoncze"
mówiłem ze skromny :) tylko on umie dokończyc ale jednak częściowo ( ͡° ͜ʖ ͡°)
mówiłem ze skromny :) tylko on umie dokończyc ale jednak częściowo ( ͡° ͜ʖ ͡°)
Oto ANYmal C - nowe wcielenie robo-psa ze Szwajcarii

Według zamysłu specjalistów, maszyna świetnie będzie sprawdzała się jako pomocnik przy niebezpiecznych dla ludzi misjach w kopalniach, platformach naftowych lub gazowych. Ma też znaleźć zastosowanie w akcjach ratowniczych po wystąpieniu naturalnych kataklizmów i misjach antyterrorystycznych.
z- 0
- #
- #
- #
- #
- #

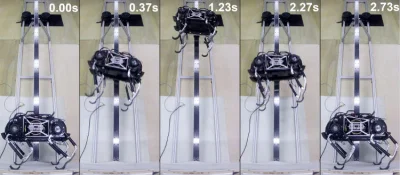
SpaceBok to rozwijany w Szwajcarii prototypowy robot do eksploracji kosmosu, który ma on nie tylko chodzić, ale głównie skakać po powierzchni innych ciał niebieskich.
Link do znaleziska: Skaczący po Księżycu/Marsie robot sprawniejszy od łazików
Interesujące? Dziękuję Ci za wykop!
#robotyka #kosmos #ciekawostki #technologia #szwajcaria #gruparatowaniapoziomu #roboty #bostondynamics #mars #ksiezyc #eksploracjakomosu
Link do znaleziska: Skaczący po Księżycu/Marsie robot sprawniejszy od łazików
Interesujące? Dziękuję Ci za wykop!
#robotyka #kosmos #ciekawostki #technologia #szwajcaria #gruparatowaniapoziomu #roboty #bostondynamics #mars #ksiezyc #eksploracjakomosu
źródło: comment_Wmnm8xl4JDJ7gqNRvCfr90z4hXKALJxN.jpg
Pobierz@Gaelwyn: Skoro zbudowany został na ETH Zurich i ZHAW Zurich, to jakie to może być miasto? ;-)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@PolskiCzarnuch: RISC-V to opensourcowa architektura CPU ze zredukowaną ilością instrukcji oraz wolną od patentów, co zwiększa jej wydajność i jest tania w produkcji.
@PolskiCzarnuch: Przykładowo coś takiego, jest teraz kolejna generacja tych płytek
https://forbot.pl/blog/komputer-wyposazony-w-procesor-z-risc-v-juz-za-20-zl-id29834
Zerknij sobie na tag #raspberrypi i tam są gotowe takie moduły do GPIO
https://forbot.pl/blog/komputer-wyposazony-w-procesor-z-risc-v-juz-za-20-zl-id29834
Zerknij sobie na tag #raspberrypi i tam są gotowe takie moduły do GPIO
Robo pies wzorowany na Boston Dynamics ale w klimacie lat 90

Krótka zajawka tego jakby firma Boston Dynamics wydała w latach 90 swojego robota ( ͡° ͜ʖ ͡°)
z- 0
- #
- #
- #
- #
- #
- #