Treść przeznaczona dla osób powyżej 18 roku życia...
Wszystko
Najnowsze
Archiwum
Treść przeznaczona dla osób powyżej 18 roku życia...

Z tym #meshnet sprawa wygląda tak:
Porotkół #cjdns bywa zawodny, dlatego teraz trwają prace nad podobnym, ale radykalnie bardziej dopracowanym #galaxy42.
W przeciwieństwie do cjdns ten protokół ma być mniej awaryjny (mniej pakietów ma gubić), będzie łatwiejszy w obsłudze niż wszystko co znamy oraz doczeka się szyrowania eliptycznego, które jest odporne na komputery kwantowe (⌐ ͡■ ͜ʖ ͡■)
https://github.com/yedino/galaxy42/branches - W Grudniu mają ruszyć kolejne prace
Porotkół #cjdns bywa zawodny, dlatego teraz trwają prace nad podobnym, ale radykalnie bardziej dopracowanym #galaxy42.
W przeciwieństwie do cjdns ten protokół ma być mniej awaryjny (mniej pakietów ma gubić), będzie łatwiejszy w obsłudze niż wszystko co znamy oraz doczeka się szyrowania eliptycznego, które jest odporne na komputery kwantowe (⌐ ͡■ ͜ʖ ͡■)
https://github.com/yedino/galaxy42/branches - W Grudniu mają ruszyć kolejne prace
@majsterV2: coś nowego w temacie?
@zapamietasz: Teraz idę w stronę ZeroTier
Dobra, widzę że zainteresowanie protokołem #cjdns rośnie.
Tak więc zostawię tutaj poradnik jak na systemie #windows postawić wirtualnego noda końcowego z dostępem do całej masy innych nodów (można podłączyć się do sporej ilości nodów dla większej niezawodności także przez wiele źródeł dostępu do sieci).
Dostęp NIE wymaga zewnętrznego ip, więc nie musisz być nodem dostępowym dla innych ( ͡° ͜ʖ ͡°)
Jaka zaleta?
- Możesz przykladowo ukryć tam swój serwer ssh
Tak więc zostawię tutaj poradnik jak na systemie #windows postawić wirtualnego noda końcowego z dostępem do całej masy innych nodów (można podłączyć się do sporej ilości nodów dla większej niezawodności także przez wiele źródeł dostępu do sieci).
Dostęp NIE wymaga zewnętrznego ip, więc nie musisz być nodem dostępowym dla innych ( ͡° ͜ʖ ͡°)
Jaka zaleta?
- Możesz przykladowo ukryć tam swój serwer ssh

źródło: comment_5LST4VU3aF8OgpyrBFK2oXyZrLUvgdG1.jpg
Pobierz
@majsterV2 a to chcesz cały rynek zrewolucjonizwoac dla dobra normików. Rozumiem. To skoncz film z 'robotem po lte' a nastepnie rozkrecaj rewolucje aby kazda kamera na rynku miala cjdns

@donpedroleone: Jak widzę nitkę, którą otwiera Majster to zawsze czekam, na kogoś komu się chce orać go w jego własnym wątku xD
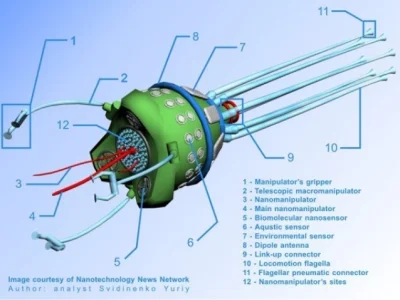
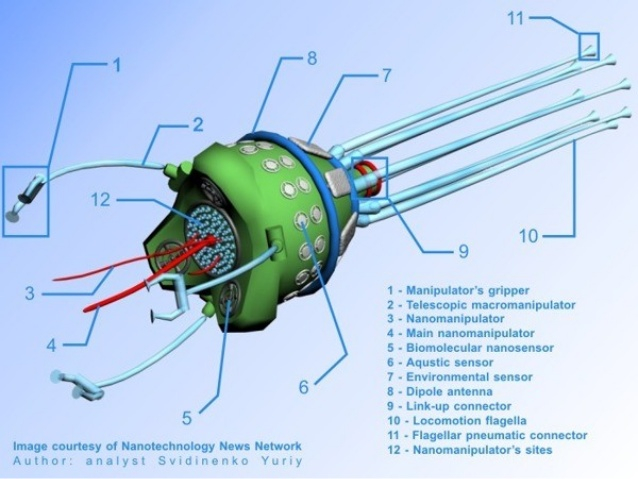
Kiedyś roboty będą tak k------o zaawansowane że szyna rs485 to będzie bardzo mało do sterowania oponentami i ich sensorami.
Prawdopodobnie każdy element oponenta w robocie będzie posiadał własny mikrokontroler z systemem operacyjnym oraz rdzeniami TPU. Do tego komunikacja będzie na tyle zaawansowana że dla lepszej łączności z innymi oponentami w grida stanie się konieczna adresacja #ipv6 z czymś na wzór obecnie znanego #cjdns (wszystkie pakiety ładnie zaszyfrowane i
Prawdopodobnie każdy element oponenta w robocie będzie posiadał własny mikrokontroler z systemem operacyjnym oraz rdzeniami TPU. Do tego komunikacja będzie na tyle zaawansowana że dla lepszej łączności z innymi oponentami w grida stanie się konieczna adresacja #ipv6 z czymś na wzór obecnie znanego #cjdns (wszystkie pakiety ładnie zaszyfrowane i
źródło: comment_z4uHjq0R0m9DOfVmF2GV9zIMbWzPwpGx.jpg
Pobierz
@majsterV2: Sądze że przesadzasz. Do wykonywania tych rzeczy powstaną zupełnie inne rozwiązania niż znamy teraz i wątpie w to bardzo, że do tego wszystkiego zaprzęgnięte byłyby takie kombajny pokroju IPv6. Świat opiera się zwykle na prostych mechanikach - problem tkwi tylko i wyłącznie w materiałach z których dany przedmiot zostanie wykonany. Materiały nie będą póki co miały charakteru programowalnego - co najwyżej stworzymy materiały z już zaszytymi jakimiś cechami -
@majsterV2: Ale to nie ma nic wspólnego z GPU - poza tym, że to też jest wyspecjalizowany procesor. Architektura Movidius to jest tak naprawdę wyspecjalizowany procesor RISC wykonujący tylko i wyłącznie konkretne operacje - dlatego jest akceleratorem dla wykonywania operacji podczas symulowania sieci neuronowej.
Chyba mnie pogrzało, ale mam zabawny pomysł ( ͡° ͜ʖ ͡°)
#majstermajstruje #przemyslenia #siecikomputerowe #linux
#majstermajstruje #przemyslenia #siecikomputerowe #linux
Witam.Pomógłby mi ktoś przez teama zoptymalizować polaczenie wan w routerze #tplink Nie wiem o co tam chodzi, np jak ustawie ipv6 to niektore strony pokazuja #ipv4 a inne #ipv6 i nie zmienia sie, za to czesto rozlacza z wan i trzeba router resetowac.
#pytanie #pomoc #logika #komputery #routery #informatyka #technologia #wan
#pytanie #pomoc #logika #komputery #routery #informatyka #technologia #wan

@Lahgt: Niebezpieczne na ślepo dawać obcym dostęp dp swojego komputera. Zrób screeny co tam masz, i się zobaczy jak to ustawić.
Ipv6 najlepiej póki co wyłączyć.
Ipv6 najlepiej póki co wyłączyć.

@Lahgt: jeżeli jest to router, który otrzymałeś od Orange to zachęcamy do kontaktu z naszym działem technicznym pod numerem 510100100 lub poprzez aplikację mobilną Mój Orange, a pomożemy ustawić urządzenie.


@KapitanDelfin: kupa nie kupa, wprowadzenie IPv6 to spoko sprawa, ale szkoda, że nie działa.
@mateusza: O wygląda na to że jest coś na rzeczy. :(
Zaraz się temu przyjrzę.
Zaraz się temu przyjrzę.
mireczki z #lede #openwrt #ipv6 #henet #siecikomputerowe potrzebuje pomocy z konfiguracja he.net. Wymiekam. Na OpenWRT dziala. Na LEDE nie. Ten sam konfig. Te same ustawienia i gunwo.
[19:56:39]-[root@main](/www) # ping6 ipv6.google.com
PING ipv6.google.com(ham02s15-in-x0e.1e100.net) 56 data bytes
From 2001:470:64c4::1 icmp_seq=1 Destination unreachable: Address unreachable
From 2001:470:64c4::1 icmp_seq=2 Destination unreachable: Address unreachable
Treść przeznaczona dla osób powyżej 18 roku życia...
IPv6 – Ranking wdrożenia protokołu na świecie.
Statystyka Google.com pokazująca procent skali wdrożenia protokołu IPv6. Podstawowymi zadaniami nowej wersji protokołu jest zwiększenie przestrzeni dostępnych adresów poprzez zwiększenie długości adresu z 32-bitów do 128-bitów. W powiązanych szczegółowe rozbicie na kraje wraz z rankingiem.
z- 0
- #
- #
- #
- #
- #
- #

Takie pytanie Ipv6 -> 1::0.0.0.0 ten adres jest poprawny. A co z 1::.0.0.0 ? To jest poprawny adres? #ipv6 #siecikomputerowe #sieci

@pkh: Nie jest. Jak stosujemy skracanie zer w postaci podwójnego dwukropka, nic za nim nie piszemy (w sensie jeszcze jednego dwukropka, czy kropki). Bardziej sprawa kosmetyczna, ale zawsze... Przyjęło się również, że stosujemy dwukropki. Niektóre szkoły mówią, że pojedyncze kropki stosuje się czasem, jak chce się podkreślić adres kompatybilny IPv6 z IPv4.
Co do ilości zer, to taki zapis nie ma sensu (pomijając fakt, że nie znam prefiksu 1::). W
Co do ilości zer, to taki zapis nie ma sensu (pomijając fakt, że nie znam prefiksu 1::). W
@julekb: Tu masz szczegóły: https://tools.ietf.org/html/rfc4291 Ewentualnie książka TCP/IP od środka Kevina R. Falla
#upc #informatyka #nolife #sieci #ipv6
Czy ktoś wie jak odpalić ipv6 w UPC? Nie moge się połączyć z żadnym serwerem przez ipv6, z tego co widzę moja karta sieciowa też myśli, że nie mam ipv6....
Ktoś coś?
Czy ktoś wie jak odpalić ipv6 w UPC? Nie moge się połączyć z żadnym serwerem przez ipv6, z tego co widzę moja karta sieciowa też myśli, że nie mam ipv6....
Ktoś coś?

@wykraczajacypozapole: dzwoń do nich. Nie wszędzie jeszcze mają możliwość odpalenia ipv6



#ipv6 protokół dla szlachty
#irc miałem nadzieje że mirki jeszcze ircują
#it znowu komputery
#jajcanarobocie chyba coś z budowlanką
#jakczujechodtok taki kolejny świrek nasz
#jakistagktoregobedeuzywacdosprawdzaniaskryptu jak widać
#irc miałem nadzieje że mirki jeszcze ircują
#it znowu komputery
#jajcanarobocie chyba coś z budowlanką
#jakczujechodtok taki kolejny świrek nasz
#jakistagktoregobedeuzywacdosprawdzaniaskryptu jak widać

@wytrzzeszcz dafuq
@le1t00: sprzątam obserwowane tagi i pisze jakie miałem by może ktoś coś sobue wybrał
IPv6 enabled Christmas Tree
Steruj światełkami na choince pingując IP ;)
z- 0
- #
- #
- #
- #
- #

Gdy jestem zalogowany z #ipv6 w #orange #neostrada (/ipv6 w nazwie użytkownika PPP), to nie mogę się podłączyć do #vpn (PPTP) w sieci #upc - Windows mówi, że bląd 800 bo nie można utworzyć tunelu. Po przełączeiu na #ipv4 działa. Gdzie może być problem?
#pytaniedoeksperta @OrangeEkspert
#pytaniedoeksperta @OrangeEkspert
@Sanawabicz: Nie, to mój RT-N66U stoi za sprzętem od UPC.
@TehNoLogic: UPC nie daje IPv6 (są testy ale tylko u niektórych klientów)
#siecikomputerowe jakieś fajne kursy z zadankami by się nauczyć into #ipv6 ?
@ratunkowa-plyta-chodnikowa: Stałe, zewnętrzne IP dla każdego urządzenia?
@wytrzzeszcz: Pamiętam jak jakiś hosting w ramach cebuli dostęp do logów miał tylko przez ftp tylko po ipv6. Okazało się, że większość klientów ftp albo ipv6 nie obsługiwała, albo była to nieudokumentowana funkcja. Następnie okazało się że mój net/router/windows tego w ogóle nie obsługuje i wtedy się poddałem.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
@wytrzzeszcz: od paru lat czekam aż dostanę od ISP; w sumie zawołam (mam nadzieję że nie będzie zły ( ͡° ͜ʖ ͡°)) @Migfirefox - IPv6 jest w ogóle planowane w najbliższych latach?
Hej Mireczki. Problemów z pingiem na Windowsie ciąg dalszy ;)
Udało mi się poniekąd zdiagnozować gdzie leży problem - przy pingu po ipv4 pierwszy ping jest wyższy od pozostałych. Po dłuższym działaniu systemu jest tylko gorzej również z następnymi pingami.
Problem nie występuje na Linuxie, tylko na Windowsie 7 [ten sam PC z dual bootem].