
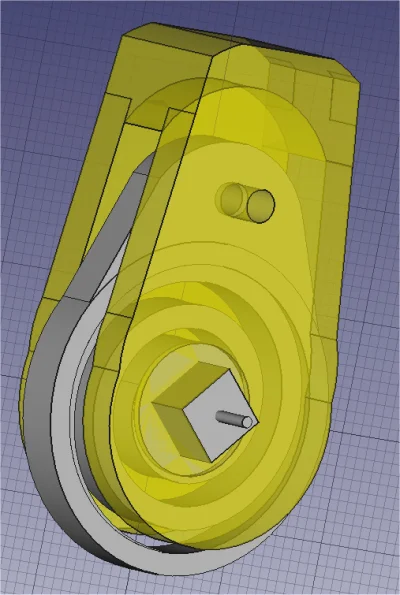
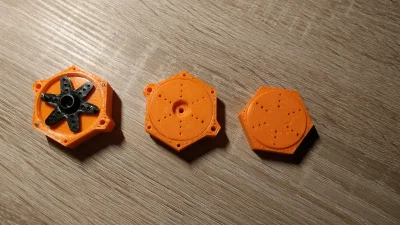
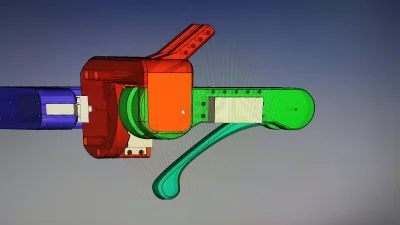
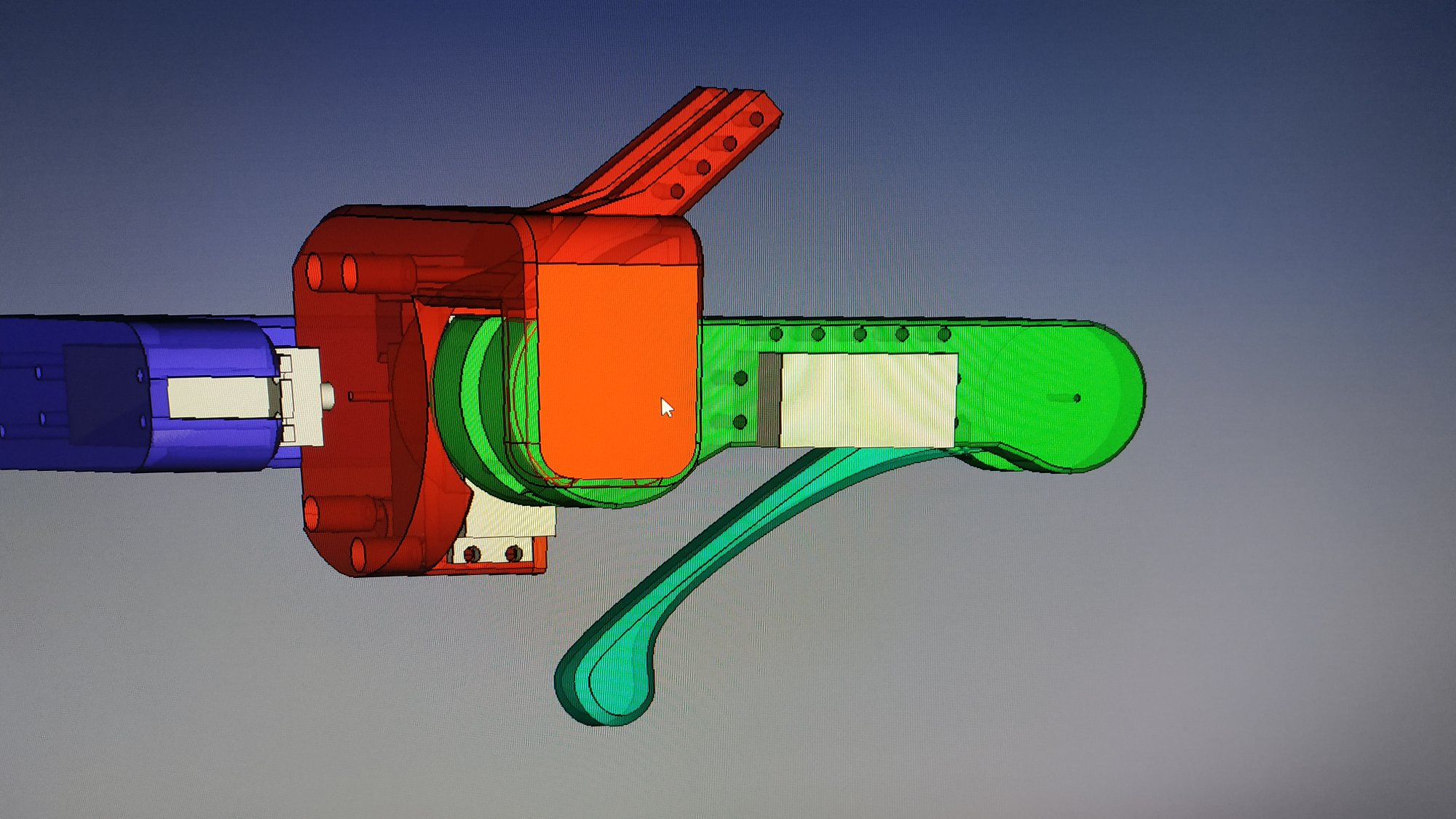
Dziś skleciłem na szybko płytkę z elektroniką sterującą do wydrukowanego w 3D sensora kolizji dla robota. Elektronika zwraca dwie wartości - analogowy odczyt napięcia po wtórniku na wzmacniaczu operacyjnym oraz dwójkowy (poziom logiczny) wykrycia kolizji, co pokazuje czerwona dioda LED na płytce kontrolera.
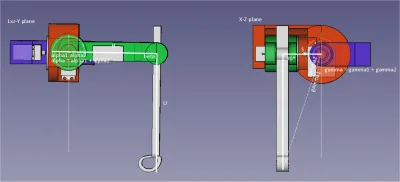
Podkówka regulacyjna pozwala wybrać poziom wyzwalania a tym samym czułość sensora.
Dla położenia centralnego ustawiony przeze mnie poziom wyzwalania to 120g, dla sił bocznych 200g - wynika do z
Podkówka regulacyjna pozwala wybrać poziom wyzwalania a tym samym czułość sensora.
Dla położenia centralnego ustawiony przeze mnie poziom wyzwalania to 120g, dla sił bocznych 200g - wynika do z






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
#druk3d #drukarki3d #diy
@LuxEtClamabunt: Wypadałoby mieć troszkę rozeznania w temacie zanim zacznie się rzucać epitetami. :)
Założenia: jedna szpulka za 80 zł, wysyłka do
@LuxEtClamabunt: A to podchodzi pod reklamację. Jeśli tylko pomiar jest wiarygodny, to takie szpule są wymieniane bez problemów.