Wszystko
Najnowsze
Archiwum
Mapa robotyki na świecie

Jak wygląda Polska na tle reszty świata pod względem ilości firm zajmujących się robotyką
z- 6
- #
- #
- #
- #
- #
- #
Five finger fillet - zabawa z nożem i dłonią w wykonaniu robota

Specjalnie zaprogramowany robot przemysłowy Staubli TX40 wykonuje znaną sztuczkę z nożem. Odważny sąsiad testuje kod podczas gdy programista15k stoi za kamerą i filmuje.
z- 2
- #
- #
- #
- #
- #
- #
The Robots are Coming

Oto przepaść w myśleniu zagranicznych uczelni, a naszych. W Gorgia TECH powstaje ROBOTARIUM, gdzie każdy będzie mógł przetestować zdalnie swój kod. Mając do dyspozycji na różne roboty z robotarium. [eng]
z- 0
- #
- #
- #
- #
- #


To jest naprawdę p------e, że tak ogarnięci ludzie muszą się martwić o pracę za więcej niż


Jestem świeżo po studiach automatyka i robotyka, to by była pierwsza praca w tym zawodzie.
Zakres obowiązków:
- projektowanie systemów automatyki i robotyki
- programowanie sterowników programowalnych PLC, systemów SCADA
- programowanie systemów kontroli procesów typu DCS

W szoku byłem jak wiele osób przychodzi i nawet nie wie jak wygląda symbol cewki.
Polski robot do nauki programowania - Photon, trafi do szkół

Do 2020 roku na świecie będzie brakować nawet miliona programistów. Już teraz w Polsce na specjalistów z tej branży czeka nawet 50 tys. miejsc pracy. Naukę programowania najlepiej zacząć od najmłodszych lat.
z- 146
- #
- #
- #
- #
- #
- #
Roboty humanoidalne są wciąż tępe jak przecinak

Stosunki międzyludzkie wciąż są zbyt trudne do zdefiniowania, o czym przekonujemy się nie tylko my sami, w codziennych relacjach, ale przede wszystkim naukowcy, próbujący stworzyć sztuczną inteligencję władną uczyć się współistnieć z ludźmi.
z- 0
- #
- #
- #
- #
- #
- #

Robot za ok. 1000 zł, który powinien znaleźć się w piwnicy każdego Mirka.

Nie odkurza, nie pierze, ale moim zdaniem oglądamy tutaj największy przełom w robotyce ostatnich dekad.
z- 79
- #
- #
- #


"Teraz roboty mają umysł Puchatka, ale to się zmieni"

Specjalista z politechniki o etyce robotów.
z- 1
- #
- #
- #
- #
- #
Vala Afshar - pierwsze minuty używania bionicznej ręki

Niesamowite jak technologia potrafi w dużej mierze polepszyć życie kalekich ludzi.
z- 63
- #
- #
- #
- #
- #
- #







#elektronika #matematyka #fizyka #robotyka #studbaza







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
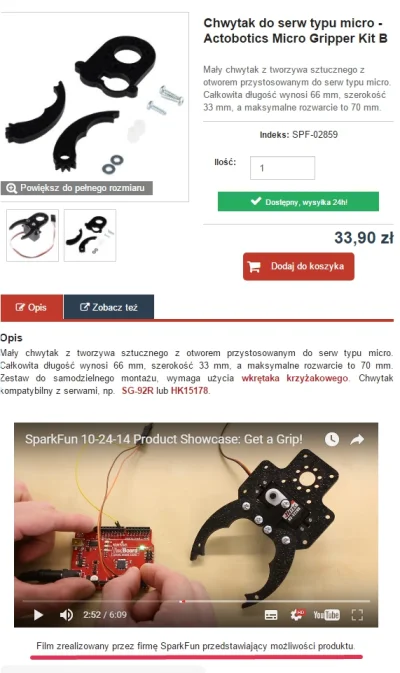
Na Alledrogo bardzo popularne sprzedają grubo za ponad 100zł z wysyłka własnie z tych stron, a tutaj za 46 :D
Dopiero zaczynam swoja przygodę.
Czy ktoś zamawiał z tej strony rzeczy do Arduino ?
https://goo.gl/tGyqjY
#arduino #avr #mikrokontrolery #mikrokontroler #robotyka #roboty #programowanie