Wszystko
Najnowsze
Archiwum



#praca #automatyka #elektronik #holandia #pracbaza #plc #mechatronika #zagranico
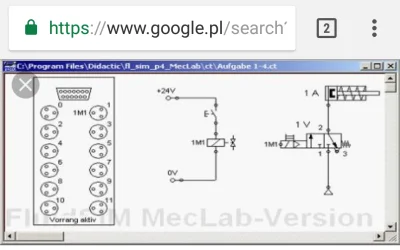
Wdzięczny byłbym za jakieś fajne materiały do nauki bo mam dostęp do PLC S7 1200 i panela hmi ale dochodzenie gdzie są różne funkcje samemu jest dość męczące :p #plc #automatyka #mechatronika #elektryka #programowanie interesują mnie również materiały o tia portal profinet profibus i wszystko co


Pytanie początkującego, ale jednak - w jaki sposób eliminuje się drgania styków w PLC?
Mam taki programik:
IF

Ale przy zalozeniu ze podlaczyles jakis gowno przelaczniczek masz kilka opcji:
1. I/O na plc maja opcje wlaczenia filtra o jakiejs tam f - pozwoli Ci to wyciąć drgania
2. daj Timer opozniajacy TON - sygnal bedzie musial byc obecny przez jakis tam czas dzialania timera. PT dobierz zeby byl
@xmaniox:

Pytanie do ludzi pracujących ze sterownikami, a nie uczącymi się. W technikach najczęściej uczą FBD, IL oraz LD
#plc #automatyka #programowanie #przemysl

źródło: comment_3yPLNCNQw1HTjLMX6uWNOPU61AoQpRxA.jpg
PobierzZ jakim językiem programowania PLC spotkałeś się w pracy najczęściej?
- LD 60.5% (23)
- SFC 2.6% (1)
- FBD 13.2% (5)
- ST 21.1% (8)
- IL 2.6% (1)

Jak najszybciej uruchomić wizualizację SCADA? Automatyka i zdalne sterowanie.

Trzymajcie się czegoś bo to urządzenie wyrywa z butów! Zapraszam do artykułu, w którym opisuję wrażenia z testów webhmi!
z- 12
- #
- #
- #
- #
- #
- #
Mam pytanie odnoście różnicy między Function Blok a Function. Uczę się PLC i proszę wyjaśnijcie. Czy jest różnica pomiędzy użycie funkcji blokowej a zwykłej w takim przypadku - Mam dwa parametry wejściowe i dwa parametry wyjściowe, które są przypisywane zmiennych w bloku danych. Załóżmy, że dwa wejścia do przyciski monostabilne, zaś dwa wyjścia to zmienna x1 i x2 z bloku danych MyDataBlock. Przypisuję do wyjść stan wysoki, jeśli któryś z przycisków
funkcja - jednorazowe dzialania w przypadku ktorych interesuje Cie tylko wynik a wszystko posrednie to smieci ktore leca w niebyt.
Blok - np. do maszyny stanow obslugujacej jakis komponent.

Polskie firmy są gotowe na Przemysł 4.0. Wyzwaniem jest gromadzenie i...

Polskie przedsiębiorstwa produkcyjne coraz chętniej wdrażają rozwiązania z zakresu automatyki i robotyki. I choć parki maszynowe są systematycznie informatyzowane, to zdolność efektywnego gromadzenia,...
z- 0
- #
- #
- #
- #
- #
- #



Zna ktoś fajne tutoriale/poradniki może być wideo do języka PLC STL (nie scl, ma to być na s7-300) ? Szczególnie interesują mnie bardziej zaawansowane rzeczy jak tworzenie pętli for, warunków wyjścia z pętli, ogólnie adresowanie indirect (porównywanie wartości w db w celu znalezienia szukanej wartości tekstowej).
Ewentualnie jakieś fajnie rozpisane i skomentowane przykładowe programy, dzięki
#plc #automatyka #programowanie

Jak wgrywać plik GSD do sterowników Siemens w Step 7 na przykładzie SICK

Komunikacja PROFIBUS? Plik GSD? Siemens step 7? Już to gdzieś słyszałeś ;) ? Zobacz na przykładzie wymiany czujnika SICK jak wygląda aktualizacja pliku GSD w Simatic Manager. Zapraszamy na artykuł napisany przez członka naszej grupy Automatyk Może Więcej - Maciej Pala!
z- 0
- #
- #
- #
- #
- #
- #
Gra Arkanoid na HMI I PLC Siemens TP700 Comfort + S7-1200
Gra Arkanoid utworzona na przemysłowym panelu dotykowym i sterowniku PLC. Autor lekko opisuje wszystko co najważniejsze jak tego dokonał :D Musisz to zobaczyć!
z- 1
- #
- #
- #
- #
- #
- #

#plc #automatyka
Jak chcesz koniecznie z fizyczną jednostką to Siemens ma zestaw szkoleniowy ze sterownikiem 1200 chyba. Są zniżki dla studentów i wykładowców.
http://iautomatyka.pl/automatyka/zestaw-szkoleniowo-edukacyjny-firmy-siemens/


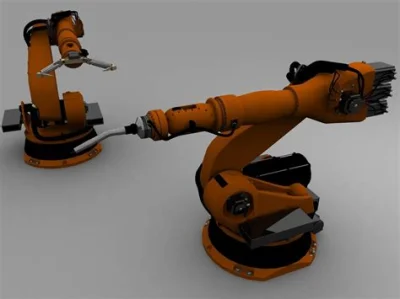
http://ool24.pl/2018/01/15/49-latek-zginal-zakladzie-gorzowie-slaskim-sledztwo-wyjasnic-przyczyny/
Według plotek które usłyszałem pracownik zakładu zginął na skutek ciosu zadanego prętem w głowę przez manipulator gdy przeprowadzał "prace konserwacyjne".
Zastanawiam się dlaczego zabezpieczenia od sterownika #plc nie zadziałały, a tym bardziej dlaczego robot był podłączony do zasilania.
Ciekawe czy to mógł być pierwszy taki przypadek w #polska.
źródło: comment_i2T7kdjedTYSsbBXJIuB7nG8lCxk9FmS.jpg
Pobierz

{kind=link}
{kind=link}
{kind=link}
tym bardziej dlaczego robot był podłączony do zasilania.
@majsterV2: robot zawsze jest podlaczony do zasilania, co najwyzej kontroler przy e-stopie odcina zasilanie z napedow. Jesli cela/maszyna miala odpowiednie dopuszczenia, to tu ewidentnie zawinil pracownik, celowo omijajac zabezpieczenia.
Ciekawe czy to mógł być pierwszy taki
Diagnostyka sterownika Mitsubishi Electric FX5U – niezbędnik utrzymania ruchu

Typowy dzień automatyka utrzymania ruchu składa się z paru elementarnych czynności. Po pierwsze z wysłuchania poprzedniej zmiany odnośnie tego co działo się na dyżurze. Wysłuchując kolegów oczywiście trzeba zaopatrzyć się w kawę, która w zależności
z- 0
- #
- #
- #
- #
- #
- #
Najnowsze sterowniki PLC EATON i moduły ultraslim

Nowe modułowe sterowniki programowalne PLC firmy Eaton umożliwiają producentom maszyn i systemów opracowywanie nowoczesnych koncepcji automatyki, zwłaszcza w połączeniu z systemem XN300 I/O i panelem dotykowym XV300. Modułowy sterownik zapewnia wysoki poziom wydajności maszyny dzięki...
z- 0
- #
- #
- #
- #
- #
- #
Nie każdy powinien być programistą: aplikacje mobilne do niszczenia fabryk

Smartfony stały się podstawowym narzędziem pracy inżynierów odpowiedzialnych za nadzór produkcji. Ich głównym zastosowaniem nie jest jednak prowadzenie rozmów…
z- 0
- #
- #
- #
- #
- #
- #
Historia o wymianie falowników SEW, GSD i Step7 Modernizacja na Utrzymaniu Ruchu

Przedstawię wam moją metodę modernizacji maszyny – wymiana przemiennika częstotliwości na nowy model, wraz z całą procedurą transferu programu i parametrów. Przy takiej modernizacji niezbędna jest także ingerencja w sterownik PLC i zmiana pliku GSD, oraz parę innych czynności.
z- 0
- #
- #
- #
- #
- #
- #
#humorinformatykow #siecikomputerowe #takaprawda #automatyka #przemysl #energetyka #plc
Ilość włókien w liniach zależy od klasy obiektu. To, że włókien jest niewiele wynika z faktu, że w lince odgromowej nie wiele można było tego zmieścić na tamte czasy. Linie te były budowane w końcówce lat 80 i początku 90. Koszty kabla światłowodowego były jakieś 50 razy większe niż dzisiaj a koszt zakończeń/mufowania był nawet 100 krotnie razy wyższy niż dzisiaj.