Treść przeznaczona dla osób powyżej 18 roku życia...
bielu000

TLDR; 3k za pórczony kurs, poźniej egzamin - zdasz - gwarancja pracy. ps tak mam kobiety w teamie. ps.2. jasne prywatna firma może robić co chce, niemniej jednak szkoda, że wielu enuzjastów programowania już na starcie jest dyskryminowanych przez losowy wybryk natury, na który nie mieli wpływu.
z
źródło: comment_1624860117JMKb1B9F2C4A2H7O3e6Ix5.jpg
Pobierz
źródło: comment_1627318028ZkzY4XedksNTe4tmJNsU1G.jpg
Pobierz
źródło: comment_1627279704Pal9Abef2lY3ug2yaNuIyu.jpg
PobierzKomentarz usunięty przez autora
źródło: comment_1624810223niuUiBDN12JMdY0z9yI0rm.jpg
Pobierz
źródło: comment_1624810990GmSZQ40C4Xvu7zOYHRD3HX.jpg
Pobierz
źródło: comment_1624606334PFCZEj50zRoj6f9KdyJwQc.jpg
Pobierz
źródło: comment_1624571355WP26IetYfYAANAhyn6IHj3.jpg
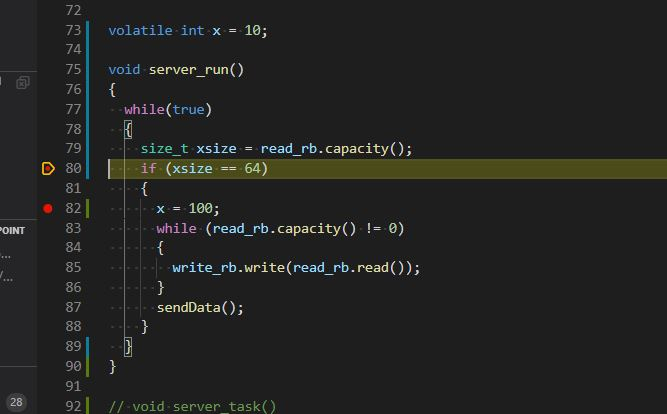
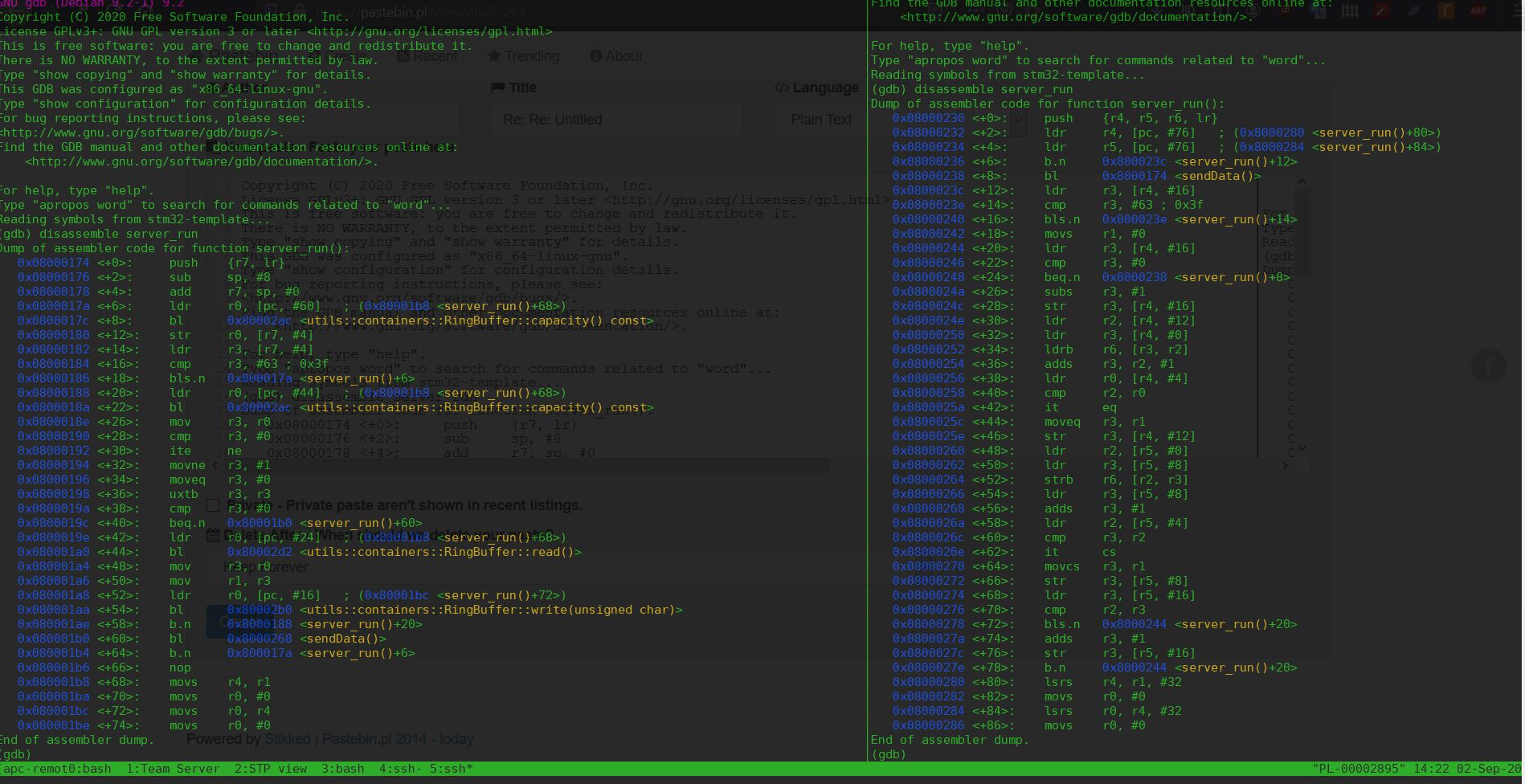
Pobierzvoid server_run()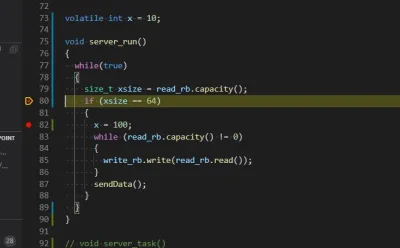
źródło: comment_1598391084SAwPWmWNrrZtOhNK7LGGRh.jpg
Pobierz
źródło: comment_15990498523LeZY7Rw4PYYm9hot28MyM.jpg
Pobierz






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}