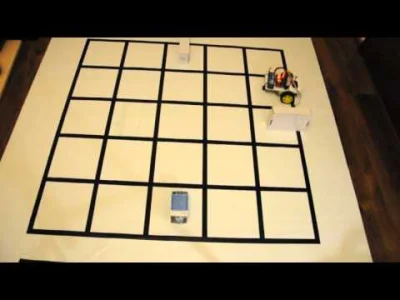
Chciałbym dziś pokazać jednego z robotów do mojej pracy dyplomowej (komunikacji między robotami mobilnymi ), tutaj z program do jedzenia po polach oraz omijaniem przeszkód. Dane o przeszkodzie będą wysyłane do drugiego robota, który nie posiada własnego czujnika do wykrywania przeszkód i dzięki czemu też będzie mógł je omijać. Podstawa wykonana z spienionego PCV, silniki z allegro, mocowania do nich wydrukowane na drukarce 3D, kółko podporowe z Castoramy ( ͡° ͜
Wszystko
Najnowsze
Archiwum
Batllebots 2015! #gimbynieznajo

- 2
- #
- #
- #
- #
- #
- #

@kwanty: Jest szybszy, więcej wyjść/wejść, DMA, debugging, więcej pamięci itd. I po prostu chce się nauczyć czegoś nowego, miałem trochę programowania STM na studiach ale to po łebkach tylko ( ͡° ʖ̯ ͡°)



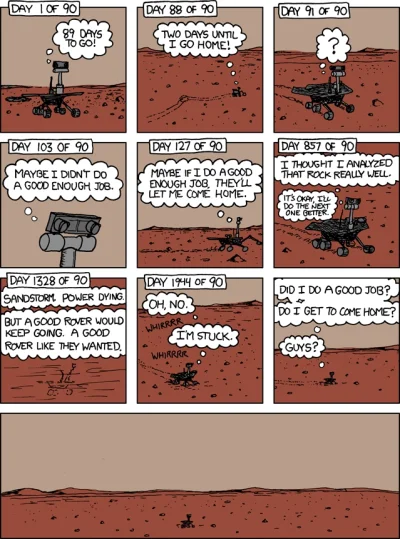
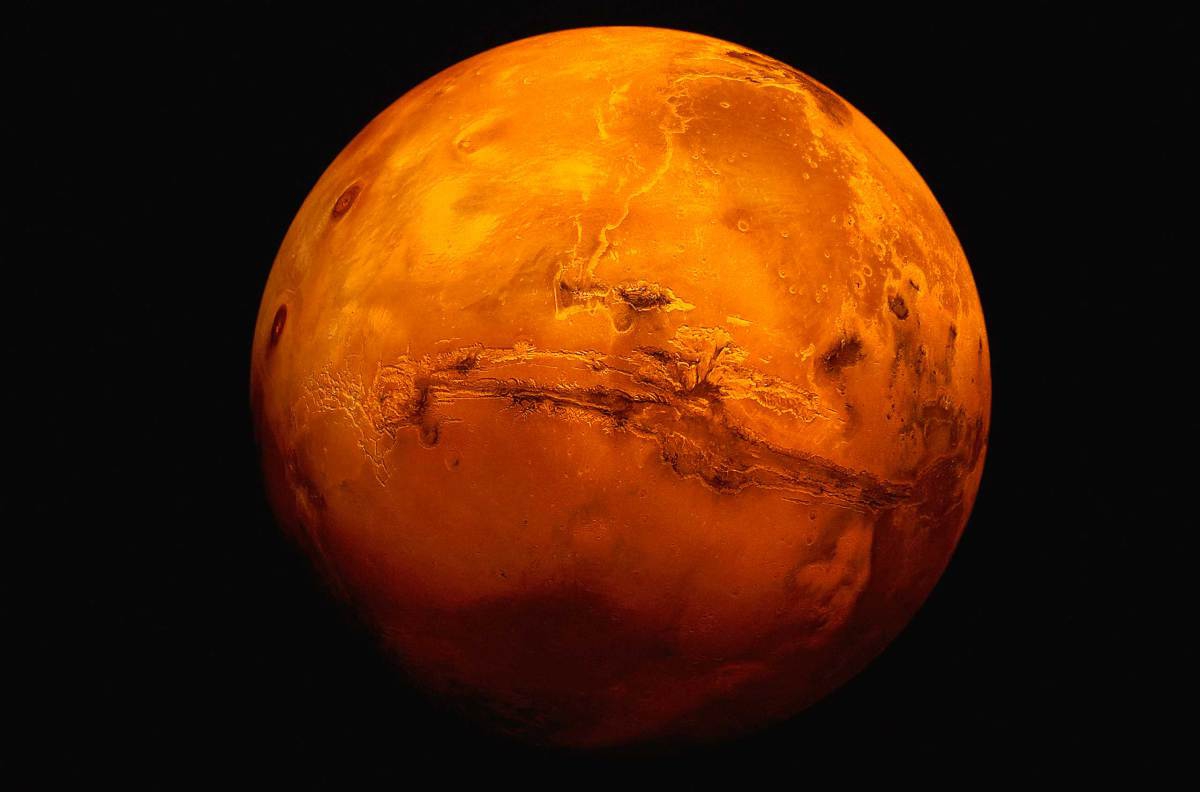
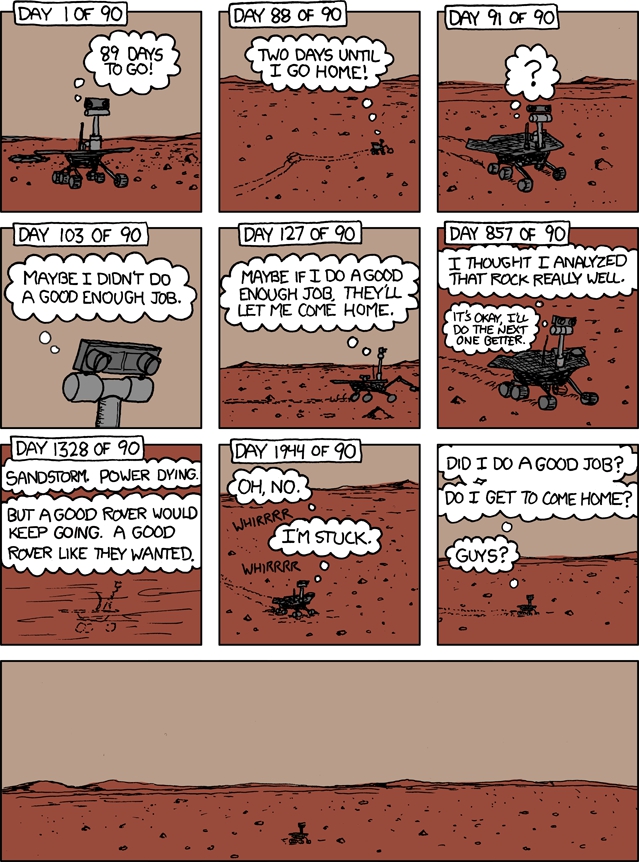
Mars
jedyna znana człowiekowi planeta, zamieszkana przez roboty
(populacja: 7 sztuk jak na razie)
#ciekawostki #kosmos #eksploracjakomosu #roboty
jedyna znana człowiekowi planeta, zamieszkana przez roboty
(populacja: 7 sztuk jak na razie)
#ciekawostki #kosmos #eksploracjakomosu #roboty

źródło: comment_AAAD7bn0HFOcaq8CcUTkfspBEhVNA9s1.jpg
Pobierz@jesse__pinkman: Powinni tam wysłać robota budujacego roboty :)



W Polsce za mało robotów. Jesteśmy w ogonie Europy

W Europie średnio na 10 tys. pracowników przypada 85 robotów, w Polsce - 22 roboty - wynika z badań IBnGR. Robotyzacja to obniżenie kosztów produkcji i łatwiejsze planowanie - podkreśla prezes Fanuc Polska Jędrzej Kowalczyk.
z- 8
- #
- #
- #
- #
- #

Robot ABB - YuMi- pakuje prezenty w reklamach Media Markt. Szwedzi wożą go po marketach i pokazują jak pakuje prezenty na żywo ( ͡° ͜ʖ ͡°)
#abb #roboty #robotyka #mediamarkt #technologia #ciekawostki
#abb #roboty #robotyka #mediamarkt #technologia #ciekawostki


@ksaler: spxDd
Dla odmiany, coś innego niż Baxter.


Zaczęło się... Wy się ISIS boicie, a za rogiem Skynet i inne Matrixy się czają!
#robotyka #roboty #sztucznainteligencja #artificialintelligence #programowanie
#robotyka #roboty #sztucznainteligencja #artificialintelligence #programowanie

Student obrywa w twarz odłamkiem, podczas walki robotów

Pojedynek między Mojo-jojo a Golu, kiedy to podczas starcia z jednego z robotów odrywa się części, która to uderza w twarz widza.
z- 0
- #
- #
- #
- #
- #
- #
Popularnonaukowy kanał znajomej dotyczący robotów. W tym odcinku "jak roboty radzą sobie z uszkodzeniami".
https://youtu.be/zKbmW2Nb7DI
#roboty #ciekawostki #nauka #yt #technologia
https://youtu.be/zKbmW2Nb7DI
#roboty #ciekawostki #nauka #yt #technologia

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@pumarancza: Niech coś z dźwiękiem zrobi, obróbka czy coś. Pewnie się czepiam ale nerwy mnie biorą jak słucham ( ͡° ͜ʖ ͡°)
@Grzesiek_astronaut: ok, przekażę :)
NASA Awards Two Robots to University Groups for R&D Upgrades
http://www.nasa.gov/press-release/nasa-awards-two-robots-to-university-groups-for-rd-upgrades
Ciekawe co ze starym robonautą.
#kosmos #nasa #roboty #technologia #astronewsy #dragonspamuje
http://www.nasa.gov/press-release/nasa-awards-two-robots-to-university-groups-for-rd-upgrades
Ciekawe co ze starym robonautą.
#kosmos #nasa #roboty #technologia #astronewsy #dragonspamuje

źródło: comment_tsIBDfXAwnkctYJVXUnWcyGW157YZcl5.jpg
Pobierz{kind=link}
Jak mama robot robi małe dzieci.
https://youtu.be/abthGNq4UZo
Kanał znajomej, wrzuca tam krótkie, ciekawe filmy o robotach raz na 2 tygodnie.
#technologia #roboty #ciekawostki #yt #nauka
https://youtu.be/abthGNq4UZo
Kanał znajomej, wrzuca tam krótkie, ciekawe filmy o robotach raz na 2 tygodnie.
#technologia #roboty #ciekawostki #yt #nauka
Jak mama robot robi małe dzieci.
https://youtu.be/abthGNq4UZo
Kanał znajomej, wrzuca tam krótkie, ciekawe filmy raz na 2 tygodnie.
#technologia #roboty #ciekawostki #yt #nauka
https://youtu.be/abthGNq4UZo
Kanał znajomej, wrzuca tam krótkie, ciekawe filmy raz na 2 tygodnie.
#technologia #roboty #ciekawostki #yt #nauka
Taki robot dowiezie zakupy? Oto Starship, projektów współtwórców Skype

Drony właściwie nie są potrzebne do rewolucjonizowania dostaw. Wystarczą roboty na kółkach, takie jak te zaprezentowane przez firmę Starship Technologies.
z- 1
- #
- #
- #
- #
- #
Chiny zastępują pracowników fabryk robotami!

Chiny od kilku lat borykają się z rosnącymi kosztami produkcji, które wynikają m.in. z coraz wyższych płac. Miasto Dongguan, gdzie powstaje 18 proc. sprzedawanych na świecie smartfonów, znalazło rozwiązanie: zastąpić pracowników fabryk robotami
z- 2
- #
- #
- #
- #
- #
U fundamentów robotyki - felieton - - fantastyka, książki fantastyczne,...

Cały ostatni tydzień spędziłem na poprawianiu pozycji robota. Wierzcie lub nie – nie jest to najciekawsza rzecz na świecie. Pięć setek w prawo i śrubo...
z- 0
- #
- #
- #
- #
Dziewczyna + 100 tańczących świecących kulek - robotów, ciekawy wideoklip w 4K

100 Dancing Robots Come to Life (ft. Jordyn Jones) - 4K
z- 0
- #
- #
- #
- #
- #
Robot nalewający p--o

KUKA LBR iiwa bierze udział w konkursie nalewania piwa. Jak myślicie kto jest lepszy? człowiek czy robot?
z- 0
- #
- #
- #
- #
- #
#spoileralert #starwars #gwiezdnewojny #roboty #r2d2 #b3 #byloczyniebylo #mozebyloamozenie
źródło: comment_jejRBCYObxPZKXWNfhzsmMNykvYzF01t.jpg
Pobierz