
Witty via Android

Siemka, jestem trochę zielony w temacie silników krokowych, dlatego potrzebuję waszej pomocy w doborze takiego o parametrach ok. 5Nm przy ok. 120RPM - mam tu dość spory margines. Przy niektórych silnikach widziałem parametry np. 4Nm i przy odpowiednim sterowniku aż do 900RPM. Wydaje mi się, że przy tak dużej prędkości moment spada - jeśli tak to jak bardzo- ale wolę się upewnić. Chciałbym zmieścić się w budżecie do ok. 400zł razem ze
@Hefajstos_Kowalski: przy tak niskich wymaganych obrotach nie łatwiej będzie Ci wziąć mniejszy silnik i dołożyć przekładnię?
@Hefajstos_Kowalski: W stepperach moment trzymający to najwyższy w całej charakterystyce, później wraz z rozpędzaniem silnika, moment spada. Ale to 120RPM to żadne rozpędzanie, więc tym bym się nie przejmował. Do jakiej aplikacji szukasz napędu?
@Hefajstos_Kowalski: co do łączenia stepa, to w dużym uproszczeniu: połączenie szeregowe to wyższy moment trzymający, który szybko spada wraz z rozpędzaniem, połączenie równoległe to niższy moment trzymający, ale spadający "powoli" wraz z rozpędzaniem.
Co do Twojego projektu - tu jest typowa aplikacja pod zestaw silnik DC z przekładnią od wycieraczek samochodowych ( ͡° ͜ʖ ͡°) Nie musisz sterować pozycją, tylko prostą sekwencją typu ruch do przodu/do
Co do Twojego projektu - tu jest typowa aplikacja pod zestaw silnik DC z przekładnią od wycieraczek samochodowych ( ͡° ͜ʖ ͡°) Nie musisz sterować pozycją, tylko prostą sekwencją typu ruch do przodu/do
@Hefajstos_Kowalski: pierwsza sprawa: jeżeli silnik jest "lewy" lub "prawy", to pewnie chodzi tu o to, że podłączając go do standardowej wtyczki w samochodzie będzie się kręcił w tym kierunku. Ale Ty nie masz standardowej wtyczki w samochodzie, tylko sam robisz sterowanie do niego, a zmiana kierunku obrotów silnika DC to tylko zamiana biegunów zasilania, więc bez obaw, będziesz mógł nim kręcić w lewo i w prawo.
Druga kwestia, to zatrzymanie
Druga kwestia, to zatrzymanie
@Hefajstos_Kowalski: co do trzymania pozycji pionowej, jeżeli podnosicie prawie do pionu, to jest możliwe, że nie będzie potrzebny zewnętrzny hamulec, a hamować będzie tylko przekładnia, bo to jest układ samohamowny (przekładnia ślimakowa). Przy opuszczaniu najprawdopodobniej "wolny" PWM w kierunku opuszczania.
@Hefajstos_Kowalski: luz, jak projekt będzie nabierał kształtów to postuj ;)
@Hefajstos_Kowalski: czy na pewno można sterować przez PWM? Na pewno. Ale jak podłączyć kabelki to już zostawiam Tobie do metody prób i błędów, nic się nie stanie jak podłączysz źle, najwyżej silnik się nie zakręci ;) A co do pytania o zależności pomiędzy obciążeniem a prędkością - jeżeli masz do dyspozycji charakterystykę momentu dla danego silnika to można sobie takimi pytaniami zaprzątać głowę, jeżeli nie masz (a tu chyba jej
Flippy - Robot, który zastąpi osobę od smażenia hamburgerów i nie tylko

Automatyzacja pracy postępuje. Oto jeden z takich przykładów. Robotyczne ramie Flippy, które może zastąpić osobę od smażenia hamburgerów i nie tylko. Jest wydajny, powtarzalny a do tego z czasem nabiera doświadczenia i się "uczy".
z- 5
- #
- #
- #
- #
- #
- #
Witty via Android
@koostosh te same osiągi mniejszym kosztem, owszem. Ale tym podejściem okazałoby się, że do zrobienia hamburgera potrzeba 10 takich wyspecjalizowanych maszyn jeżeli ich zakres pracy miałby się ograniczać do jednego konkretnego ruchu. Dlatego próby wykorzystywania manipulatotów o kinematyce zbliżonej do ludzkiej ręki są w takich przypadkach uzasadnione.

A więc wreszcie weekendy będę miał wolne, i spokojnie sobie rozkręcę do pracy moje maszynki #cnc we wtorek obrona na #studbaza i własny dość prosty projekt #plc #automatyka przynajmniej wygląda schludnie.

źródło: comment_MeNKboVqx8irvjb64u5wNpXFALCrE0ze.jpg
Pobierz
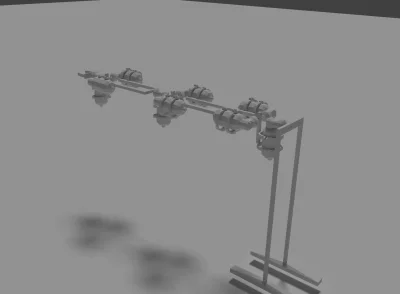
Czy gdybym wykonał taki manipulator ze silników od wycieraczek które mają przekładnię ślimakową to czy on się sprawdzi przy podnoszeniu sporych ciężarów (50kg worki z paszą lub cementem)?
Są to silniki które dobrze znam, działają na 12v (chociaż można napięcie obniżyć o ponad połowę zmniejszając obroty), biorą około 60W, są tak mocne że mogą rękę połamać, platforma z kółkami o średnicy 10cm spokojnie na dwóch silnikach przemieściła 180kg, lecz obecnie zastosowałem w
Są to silniki które dobrze znam, działają na 12v (chociaż można napięcie obniżyć o ponad połowę zmniejszając obroty), biorą około 60W, są tak mocne że mogą rękę połamać, platforma z kółkami o średnicy 10cm spokojnie na dwóch silnikach przemieściła 180kg, lecz obecnie zastosowałem w
źródło: comment_b3wH8dWiQlPg4xToDOwG9oM0bM3F6hj1.jpg
Pobierz
Witty via Android
@majsterV2 nie ma opcji na 50kg na tak długim ramieniu z tymi silnikami jeszcze licząc ciężar odpowiednio sztywnej konstrukcji. A tak w ogole, to pytasz teoretyczne, czy faktycznie chcesz coś takiego zbudować?
Witty via Android
@majsterV2 rzuć okiem na roboty Kuka KR Agilus (udźwig do 6 kg) i Kuka KR 20 (udźwig do 20 kg). Zobacz jakie to są maszyny, a nie biurkowe zabawki. Nie widzę możliwości zbudowania półamatorskiego robota o udźwigu większym, niż 5 kg, ale może ktoś kiedyś mnie pozytywnie zaskoczy ( ͡~ ͜ʖ ͡°)
Witty via Android
@Taco_Polaco
@majsterV2 już po proporcjach z rysunku, na którym są silniki wnioskowalem, że ramię ma około 1 m, dlatego pisałem, że nie ma opcji zrobić tego tylko na tych silnikach (które swoją drogą i tak są zawsze zintegrowane z przekładnią ślimakową).
@majsterV2 ten robot mialby się poruszać "sam", czy ktoś ręcznie każdym silnikiem z osobna miałby ruszać? Bo to temat na elaborat ze sterowania silnikami w pętli zamkniętej.
@majsterV2 już po proporcjach z rysunku, na którym są silniki wnioskowalem, że ramię ma około 1 m, dlatego pisałem, że nie ma opcji zrobić tego tylko na tych silnikach (które swoją drogą i tak są zawsze zintegrowane z przekładnią ślimakową).
@majsterV2 ten robot mialby się poruszać "sam", czy ktoś ręcznie każdym silnikiem z osobna miałby ruszać? Bo to temat na elaborat ze sterowania silnikami w pętli zamkniętej.
Witty via Android
@majsterV2 co do projektu - napędzanie jednej osi dwoma silnikami umieszczonymi naprzeciwko siebie jest tutaj błędne z założenia, bo one będą sobie bardziej przeszkadzać, niż pomagać. Takie rzeczy stosuje się rzadko i z wykorzystaniem precyzyjnych serwonapędów, a nie silników od wycieraczek ( ͡° ͜ʖ ͡°)
Witty via Android
@majsterV2 nie chcę wyjść na dziada z elektrody, więc pozwolisz, że odpuszczę dyskusję, powodzenia w projekcie (╭☞σ ͜ʖσ)╭☞
ABB uruchomiło centrum pokazowe swoich robotów w Warszawie

W centrum jest sala pokazowa oraz miejsce na szkolenia i testy.
z- 5
- #
- #
- #
- #
- #
- #

Wrzucam jeszcze raz. Dzisiaj znów problem z automatyka. Umiem angielski ale jednak daje to pewna barierę i nie wiem jak zrobić te zadania drugie w komentarzu
#automatyka #ais #sterowanie #studia
#automatyka #ais #sterowanie #studia
źródło: comment_pqu4SY1hyqLXukeCqTw0GtArapgNfev2.jpg
Pobierz@Abriam: co do zadania 2 (temperatura), może jeżeli inaczej przedstawię problem, to pomoże. Masz podgrzewającą się o 1 stC/s substancję, której temperaturę mierzysz czujnikiem o transmitancji G. Czyli wejściem na tę transmitancję czujnika jest temperatura rzeczywista substancji, wyjściem z tej transmitancji jest temperatura zmierzona. Znasz wejście (funkcja liniowa), znasz transmitancję, jesteś w stanie policzyć wyjście. Wyjście przerzucasz na dziedzinę czasu i podstawiasz za to wyjście 101,2 stC i liczysz w
@Abriam: tak to widzę.
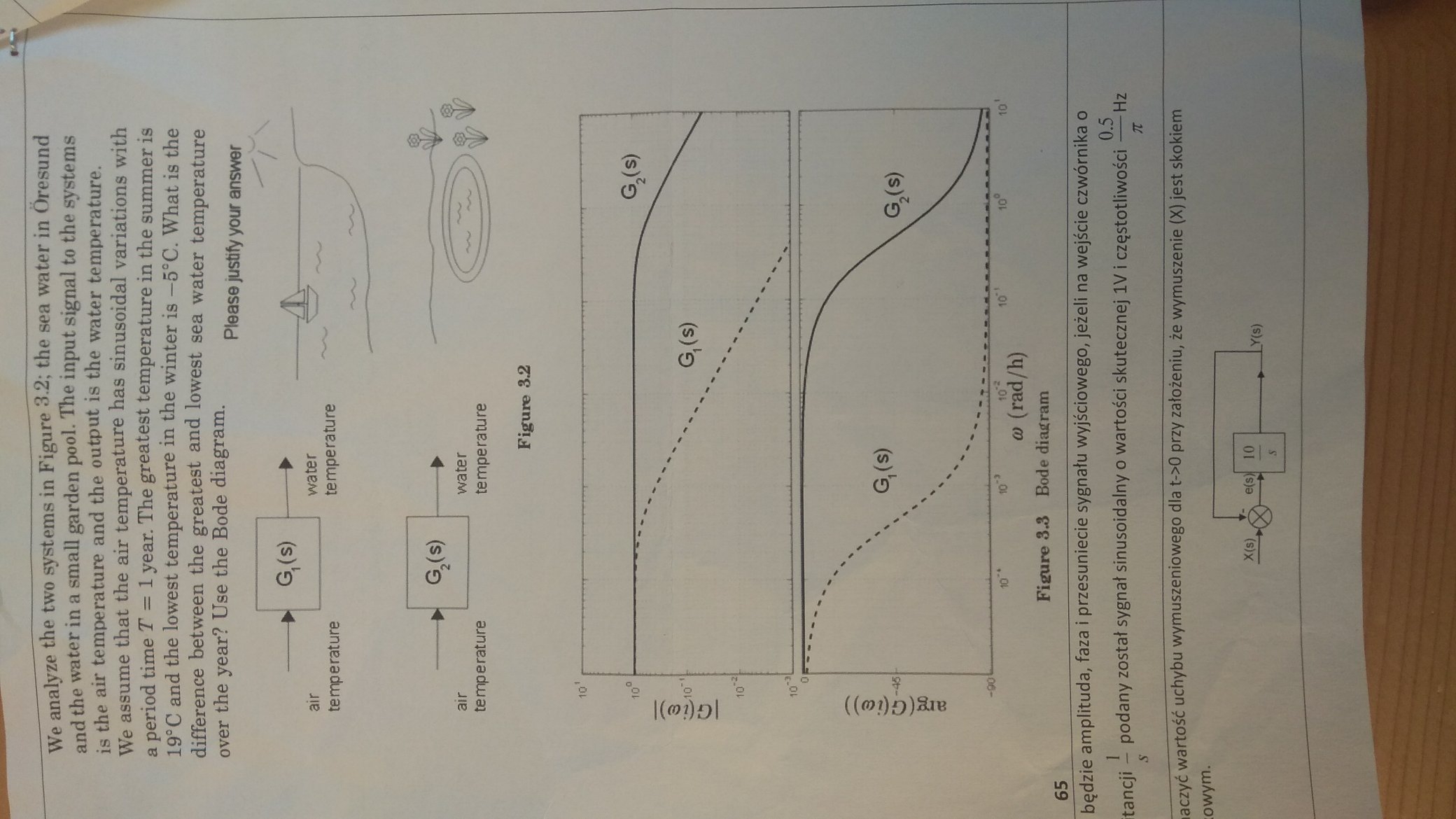
Co do zadania 1 - sygnał wejściowy to sinusoida o T = 1 rok. Musisz obliczyć pulsację tego sygnału w jednostkach takich, jak na wykresach (rad/h), a przypminam, że pulsacja = (2*pi)/T. No i znając pulsację z wykresów możesz odczytać wzmocnienie i przesunięcie fazowe. Pytanie jest o najwyższą i najniższą temperaturę w skali roku, czyli przesunięcie fazowe Cię nie interesuje, bo nie interesuje Cię kiedy dokładnie
Co do zadania 1 - sygnał wejściowy to sinusoida o T = 1 rok. Musisz obliczyć pulsację tego sygnału w jednostkach takich, jak na wykresach (rad/h), a przypminam, że pulsacja = (2*pi)/T. No i znając pulsację z wykresów możesz odczytać wzmocnienie i przesunięcie fazowe. Pytanie jest o najwyższą i najniższą temperaturę w skali roku, czyli przesunięcie fazowe Cię nie interesuje, bo nie interesuje Cię kiedy dokładnie
@Abriam: pokaż obliczenia ;)
@Abriam: tylko, że w tym rozwiązaniu (jeżeli dobrze widzę) nigdzie nie masz informacji o tym liniowo narastającym sygnale wejściowym. Zapisz transmitancję jako G(s) = Y(s)/X(s), gdzie X(s) to L{x(t)}, a x(t) = t (liniowo narastająca temperatura rzeczysista. Z tego zapisu wyciągnij Y(s), przerzuć na y(t) i dopiero wtedy podstaw to 101,1 i oblicz czas.
Dostałem tam zestaw kilku zadanek automatyki i sterowania i mam problem z obliczeniem zadania 56 i 59 więc jakby jakiś automatyk dał radę mi pomóc to byłbym wdzięczny
#automatyka #robotyka #studia
#automatyka #robotyka #studia

źródło: comment_54c22qnJebZ97IQRm51oPlmPW2eoUeap.jpg
Pobierz@Dzonzi: hurr kto to widział, Transformata Laplace'a to nie automatyka ( ͡° ͜ʖ ͡°) Tylko, że 75% programu AiR na tym bazuje.
@Dzonzi: i po co wyzywanie od Januszy (-‸ლ) Po prostu na studiach (w szczególności na pierwszym stopniu) jest wysyp ludzi, którzy po zaliczeniu praktyk opowiadają jak to teoria sterowania wykraczająca poza PID jest bezużytecznym pieprzeniem dziadków. Tymczasem prawda jest taka, że do programowania PLC, robotów czy robienia czegokolwiek znanego jako "automatyka praktyczna" to się faktycznie nie przyda, ale zarazem jest to tak proste, że nic poza
@Dzonzi: jasne, że są. Ja tylko mówię o tym, że uważam za błędne podejście typu "teoria sterowania, matlaby i simulinki to bzdety i pierdoły", bo ogrom tych zagadnień jest w praktyce wykorzystywany. To, że do zaprogramowania robota nie trzeba wiedzieć jak działa PID ze sprzężeniem wyprzedzającym i antywindupem, to nie znaczy, że ten sterownik nie jest wykorzystywany w każdym przemysłowym robocie, bo jest. To w odniesieniu do tego, że to
#automatyka czy jest w ogóle opcja znalezienia pracy w branży, która nie wiąże się z pracą w ur (praca na zmiany) albo wyjazdami (uruchomienia itp)? Jestem mega podjarany programowaniem sterowników i paneli hmi ale od 2 miesięcy jeszcze nie spotkałem się z ofertą pracy która nie wiązała by się z koniecznością wyjazdów na uruchomienia. Pracuje w ur ale praca na zmiany mnie też wykańcza. Wychodzi na to że trzeba iść
@RBNG: spotykałem się z zakładami produkcyjnymi, w których UR to elektrycy i mechanicy, a automatyków było jeden lub kilku i oni pracowali w godzinach "biurowych". W firmach integratorskich wyjazdy to faktycznieo norma, ale możesz poszukać mniejsze, dopiero rozwijające się firmy, bo one często zaczynają od zleceń lokalnych.
Siema Mirki. Prawdopodobnie będzie to pytanie mocnego nowicjusza, ale już mam mętlik w głowie i nie wiem jak to ugryźć. Chodzi mi o ten silnik szczotkowy prądu stałego, z magnesami trwałymi- http://datasheet.octopart.com/FK-260SA-14280-Mabuchi-datasheet-15250215.pdf , używane mi.n w roombie jako napęd odkurzacza, czy w modelach rc. Jeśli dobrze rozumuję, przez zastosowanie magnesów trwałych automatycznie jest to silnik obcowzbudny(jako że stojan nie posiada zasilania uzwojenia przez magnesy, a twornik ma zasilanie zewnętrzne z akumulatora/sieci). Natomiast
Witty via Android
@Jellycrusher co dokładnie chcesz zmierzyć, bo "pomiar wartości silnika" nie wyjaśnia sprawy( ͡° ͜ʖ ͡°)
Witty via Android
@Jellycrusher rzuć okiem czy to załatwia sprawę: https://courses.ece.ubc.ca/elec344/Labs/Lab2_Manual.pdf

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Treść przeznaczona dla osób powyżej 18 roku życia...
Kiedy nie masz czasu czytać co tam wymyśliła tłumaczka, więc jedziesz copy-paste ( ͡° ͜ʖ ͡°)
#pracbaza #praca #januszebiznesu #automatyka
#pracbaza #praca #januszebiznesu #automatyka

źródło: comment_1P3L8ouZYFoqk1g1Qb2WzOTE9pUtdJ5f.jpg
Pobierz{kind=link}
Sterownik silnika coś świruje. Mam taki oto: https://abc-rc.pl/sterownik-silnika-krokowego-30a
Podłączony jest tak: główne zasilanie z zasilacza 12V, OUTY do silnika, PWM do PWM z arduino, INA i INB do digitali arduino, EN do 5v i zasilanie do logiki też 5V z arduino. Przy jednym kierunku (INA-HIGH, INB-LOW) silnik działa normalnie i na wyjściu jest niecałe 12V - chyba kolo 11.5. Przy drugim kierunku (INA-LOW,
- piny do podłączenia silnika są 2 (typowo dla silnika DC), a nie 4 (typowo dla krokowca),
- piny sterujące oznaczone są INA
Wiem,