#dawnoniebylo #quadcopter
Wszystko
Najnowsze
Archiwum
Latający robot - nie omija przeszkód, bierze kolizje na klatę

Przy projekcie pracują rodacy
z- 8
- #
- #
- #
- #

Felonious_Gru


Właśnie przebudowałem projekt tak, aby działał w modelu modułowo-eventowym, gdzie każdy moduł ma swój wątek oraz kolejkę eventów; wątek czeka na event w kolejce i go obsługuje. Eventy mają swój priorytet. Eventy typu TICK_25MS wysyłane są przez wątek Quadcoptera, inne pochodzą od innych modułów.
Trochę kodu (ciągle się uczę poprzez takie projekty):
https://dl.dropboxusercontent.com/u/55028256/StatusExchangeModule.java.html
#programowanie #android #java #androiddev #quadcopter
Trochę kodu (ciągle się uczę poprzez takie projekty):
https://dl.dropboxusercontent.com/u/55028256/StatusExchangeModule.java.html
#programowanie #android #java #androiddev #quadcopter
Ocean z lotu ptaka nagrywany helikopterem RC

...a raczej FPV.Proszę państwa, czas na relaks! Nagrywane quadcopterem FPV z Go Pro 3 HD na pokładzie. Enjoy!
z- 82
- #
- #
- #
- #
- #
- #
- #
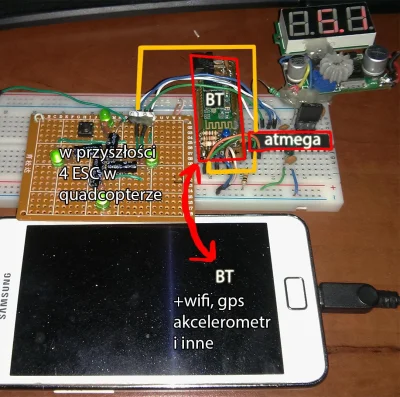
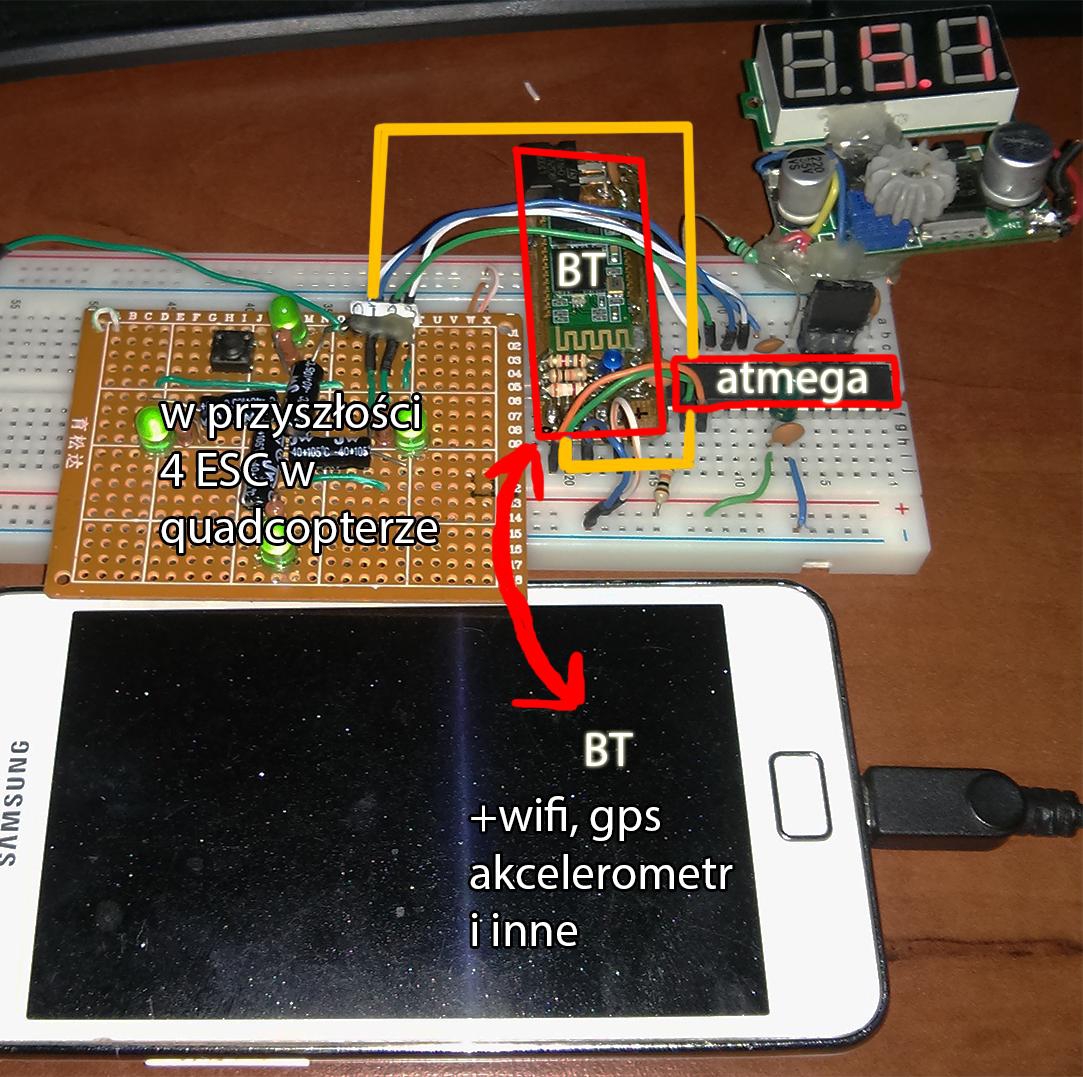
#quadcopter #elektronika #android #projekt #budowa Zanim zbudujemy prawdziwego, pierw testy na sucho :) Czekamy na części:
źródło: comment_VTYF3OB4OximBP3hcoi5O3tlbqLaWPs6.jpg
Pobierz
@Visher: czemu atmega? jezeli cos zmiennoprzecinkowego bedzie liczyć, a będzidziecie, to ją zajedziecie...
@Ja_na_wykopie: osobiście to chciałbym popracować później bardziej rzemieślniczo, tzn. zrobić taką obudowę z włókna węglowego: http://www.turbosquid.com/3d-models/3d-quadro-model/756365
ale to byłoby bardzo pracochłonne i też kosztowne, tak jak to co ty mówisz. Po skończeniu podstawowych założeń (lata, sterowany z laptopa, nagrywa obraz, leci do wskazanych punktów na mapie) odkładam projekt do czasu matury.
ale to byłoby bardzo pracochłonne i też kosztowne, tak jak to co ty mówisz. Po skończeniu podstawowych założeń (lata, sterowany z laptopa, nagrywa obraz, leci do wskazanych punktów na mapie) odkładam projekt do czasu matury.

Mój duży #quadcopter w końcu doczekał się małego braciszka ;)

źródło: comment_VaczP33VB80ZbSUUwPyQV62EcYaXBgRx.jpg
Pobierz@jestem_w_szoku: nie, na ebay.co.uk, nawiasem mówiąc chyba najszybsza dostawa z Chin jaka mi się w życiu trafiła, szło równy tydzień!
http://www.ebay.co.uk/itm/310702921082
http://www.ebay.co.uk/itm/310702921082
@Czayen: Dzięki za odpowiedź i dobrej zabawy. :)
No i w p---u, i wylądował, i cały misterny plan też w p---u.......Tydzień temu poszedłem polatać quadcopterem po 3-tygodniowych wakacjach i trochę wyszedłem z wprawy ;/ Zapomniałem, ze quad jest w trybie Acro no i miałem kraksę. Wynik: złamane ramię, złamane 2 śmigła, urwana taśma LED.
A że miałem na głowie GoPro dziele się z wami mireczki moim nieszczęściem ;)
Jak ktoś jest niecierpliwy to oglądać od 2 minuty.
http://youtu.be/oYAmvDQ57fk
A że miałem na głowie GoPro dziele się z wami mireczki moim nieszczęściem ;)
Jak ktoś jest niecierpliwy to oglądać od 2 minuty.
http://youtu.be/oYAmvDQ57fk
@Felonious_Gru: Panika... ;]
#programowanie #quadcopter #technologia #projekt Zanim dojdą części konstrukcyjne/elektryczne..
Log.d("Quadcopter-MainActivity", "Creating Quadcopter class, init()");
quadcopter = new Quadcopter(this);
quadcopter.init();nie musi.. ale IMO dobra i często stosowana praktyka, ażeby moduł czekał aż coś go zainicjuje, a nie robił wszystko w konstruktorze
@Visher: Sterowanie quadem będzie raczej systemem o ostrych wymaganiach czasowych. Pozostawianie init() w środku kodu, który zajmie czas procesora w losowym miejscu (i czy na pewno wtedy wystarczy zasobów?) jest bardzo złym pomysłem. Tak samo jak używanie new i delete doprowadzi w końcu do fragmentacji (niekoniecznie wycieku) pamięci.
@Analityk: Sterowaniem sterownikami prędkości będzie zajmowała się atmega, która będzie przez BT otrzymywać sygnały. De facto init() może być wywołane ponownie tylko w przypadku zerwania tego połączenia.. Do tego kod jest wielowątkowy, więc niezależnie wykonywane są obliczenia, komunikacja czy inne.
No ale też rozumiem, że muszę się pilnować i dzięki.
No ale też rozumiem, że muszę się pilnować i dzięki.
Quadcopter i kamerka Go Pro 3

Latałbym...
z- 1
- #
- #
- #
- #
Zwycięzca konkursu Beerlift - czyli 4 skrzynki piwa (58,7kg) podniesione quadem

Na takim to można by już polatać ;)
z- 5
- #
- #
- #
- #
Quadcopter na plenerze ślubnym to niezbyt dobry pomysł...

Epicka porażka...
z- 10
- #
- #
- #
- #
- #
Drony podbijają przestworza USA

Mobilność i ogromny wachlarz dostępnych konstrukcji sprawia, że już nie tylko wojsko i agencje wywiadowcze korzystają z przeróżnych dronów, coraz częściej sięgają po nie służby federalne i policja a także operatorzy cywilni, hobbyści, media oraz paparazzi. Film dokumentalny.[eng]
z- 5
- #
- #
- #
- #
- #
- #
- #
Znów zaliczyłem kreta quadcopterem. To drzewo wyrosło tak nagle! ;) Dwa złamane śmigła ;/. Szybka wymiana i śmigam dalej :) #quadcopter #quadrocopter

@Czayen: doczep jakiś modem od neta i rób live streamy :D
Quadcopter i trafo Tesli, a nawet dwa.

Jak to jest nigdy nie dorosnąć.
z- 0
- #
- #
- #
- #
- #
- #
Zbudowałem sobie #quadcopter. Dziś odbyłem pierwszy lot....hmm albo raczej kraksę :) Wynik: 2 złamane śmigła ;/

{kind=link}
{kind=link}
@Czayen: długo budowałeś? Jaki koszt? Masz jakieś fotki? Jaką instrukcją się kierowałeś? :)
@Nikczemny: Parę fotek tutaj: https://picasaweb.google.com/117825116009242281146/Quadcopter?authkey=Gv1sRgCIeHqJ2xj7HnIg
Kosz to na dzień dzisiejszy (mam w planach jeszcze kilka usprawnień) to jakieś 1200zł (wliczając nadajnik, którego nie miałem)
Kosz to na dzień dzisiejszy (mam w planach jeszcze kilka usprawnień) to jakieś 1200zł (wliczając nadajnik, którego nie miałem)
Film pokazujący możliwości sprzętu OMCOPTER

- 2
- #
- #
- #
- #
- #
- #
- #
Budujemy QuadCopter - DIY

po tym jak pojawił się wykop z latającym DeLoreanem, postanowiłem poszukać instrukcji jak zrobić taki Quadocopter :)
z- 2
- #
- #
- #
- #
- #
- #
- #
- #
Quadcopter sterowany Wiimotem

Niezły, co? Gość musiał się sporo napracować z samym pisaniem oprogramowania do niego!
z- 0
- #
- #
- #
- #
- #
- #
- #
- #
- #
YouTube - Aeroquad (quadcopter) Politechnika Gdańska

Latanie quadcopterem, zajefajna sprawa, polecam wszystkim konstruowanie takich zabawek.
z- 2
- #
- #
- #
- #
- #
Quadcoptery potrafią budować

Bardzo ciekawa propozycja wykorzystania quadcopterów
z- 0
- #
- #
- #
- #
Jeżeli chodzi o tę metodę to mam na myśli tylko przerobienie jej wnętrza. Do wyrzutki: