
Złożyłem sobie drona z niżej wymienionych części. Skonfigurowałem wszystko w betaflight, kontroler widzi, silniki jak testuje z betaflight też wszystko ładnie działa. Ale gdy odłaczę drona od kompa i uzbroję drona to zaczyna się telepać jakby miał padaczkę (silniki tak jakby wibrowały i nie wiedziały w którą stronę się mają kręcić. Testowane bez śmigieł). Cały dzień wczoraj nad tym spędziłem i już nie mam pomysłów co może być przyczyną. Ktoś się spotkał
Wszystko
Najnowsze
Archiwum

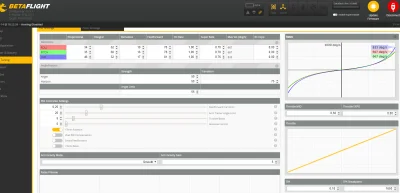
@Magnetti: o muj bosze, 2800 (ʘ‿ʘ)
Zobacz sobie jakie wartości są przy zdrowej ramie https://youtu.be/1WYDsiYJGoQ?si=xwzAQkr1jbX4ZFIX&t=1039
Chyba już wiem co się dzieje, przez wydrukowaną ramą która się gnie, wibracje z silników przechodzą na ramę, dron próbuje "wyrównać" pozycje i przez to silniki szaleją i cała rama się JESZCZE mocniej gnie przez co silniki szaleją JESZCZE mocniej, co fc próbuje wyrównać... chyba wiesz do czego dążę (:
Zobacz sobie jakie wartości są przy zdrowej ramie https://youtu.be/1WYDsiYJGoQ?si=xwzAQkr1jbX4ZFIX&t=1039
Chyba już wiem co się dzieje, przez wydrukowaną ramą która się gnie, wibracje z silników przechodzą na ramę, dron próbuje "wyrównać" pozycje i przez to silniki szaleją i cała rama się JESZCZE mocniej gnie przez co silniki szaleją JESZCZE mocniej, co fc próbuje wyrównać... chyba wiesz do czego dążę (:
@sirgorn: Dobra wszystko jasne. Odpiąłem płytkę przytrzymałem w ręce i jak ręką odjął, wszystko pięknie działa ;x Teraz tylko musze jakoś usunąć te drgana z ramy. Wielkie dzięki nie pomyślałbym ze to przez to ;x

Betaflight z numerem 4.5 właśnie się ukazał. W sam raz na rozpoczęcie sezonu 2024. Wgrywajcie i latajcie, połamania śmigieł ( ͡° ͜ʖ ͡°)
#drony #fpv #betaflight
#drony #fpv #betaflight
źródło: 1000017372
Pobierz@hrumque: To nie inav, wybór wspieranych FC jest olbrzymi.
Tak informacyjnie. Udało mi się odpalić INAV wykrywa podłączony MPU6050, HMC5883 natomiast z BMP280 jest problem bo go nie wykrywa (ikonka świeci na czerwono). Miała dziś dotrzeć rama F450 ale DHL miał to w d...e i nie dostarczył mi przesyłki więc testów i zabawy dzisiaj nie będzie :(. Więc podjąłem decyzję, że ja też mam DHL w d...e i drukuję ramę sam https://www.thingiverse.com/thing:1733953, a zamówienie wróci do sprzedawcy z informacją o zachowaniu
Nowy #betaflight 4.4.2 został właśnie wydany. Lista zmian:
Improvements
[4.4.2] DSHOT timing improvements by @SteveCEvans in #12709
[4.4.2] Reverting the config.h usage. by @blckmn in #
Improvements
[4.4.2] DSHOT timing improvements by @SteveCEvans in #12709
[4.4.2] Reverting the config.h usage. by @blckmn in #

Witajcie mam problem z serwami w latającym skrzydłe.
Mianowicie zamiast przeciwnie przy próbie "skrętu" chodzą razem i to z różnym wychyleniem.
ster wysokości to samo.
jestem
Mianowicie zamiast przeciwnie przy próbie "skrętu" chodzą razem i to z różnym wychyleniem.
ster wysokości to samo.
jestem
źródło: ShadowySpiffyBee-poster
Pobierz
@Nie_quatschen: może masz jakiś mikser na radiu? Zrób nowy czysty model i wtedy sprawdzaj. Wyjścia AUX są od przełączników, musisz je na radiu również przypisać.
@fotograf_warszawiak: faktycznie zdublowane mixy były w radiu oraz w iNav przez to głupiało.
Dzieki za pomoc ! ( ͡° ͜ʖ ͡°)
Dzieki za pomoc ! ( ͡° ͜ʖ ͡°)

#drony #fpv #betaflight
Hej, czy w betaflight można ustawić tryb ARM żeby kontroler był uzbrojony od razu po uruchomieniu? Mam aparaturę bez switcha i nie mogę ustawić AUX1.
Hej, czy w betaflight można ustawić tryb ARM żeby kontroler był uzbrojony od razu po uruchomieniu? Mam aparaturę bez switcha i nie mogę ustawić AUX1.
@Mucharek: musisz zrobić tak jak Ci mapache i felonious pisał, tego tak nie ogarniesz, bo żeby arm zadziałał throtle musi być na 0% i dopiero wtedy zmienaisz arm switch
@Felonious_Gru: to już wolę mieć gotowa aparaturę, ze switchami, z dodatkowym wyświetlaczem, na gwarancji, niz kombinować z dołożeniem tych switchy bez pewności ze zadziała ( ͡° ͜ʖ ͡°)
Witam droniarzy.
Jakiś czas temu zbudowałem tinywhoopa, jego podzespoły to
AIO board : CrazyBee F4 v3 (10A)
Silniki: 10000KV happymodel 1102
Frame: Mobula 7HD v3
Jakiś czas temu zbudowałem tinywhoopa, jego podzespoły to
AIO board : CrazyBee F4 v3 (10A)
Silniki: 10000KV happymodel 1102
Frame: Mobula 7HD v3

źródło: comment_1623669936W0UuXlXBBzE5U0vazx3CQz.jpg
Pobierz

Hej.
Czy sa jakieś ustawienia w #betaflight które sprawia ze #drony #fpv jest łatwiejszy w pilotażu?
Zbudowałem pierwszego #fpv i uczę sie nim latać, ale nie jest łatwo.....
Dzięki za sugestie
Czy sa jakieś ustawienia w #betaflight które sprawia ze #drony #fpv jest łatwiejszy w pilotażu?
Zbudowałem pierwszego #fpv i uczę sie nim latać, ale nie jest łatwo.....
Dzięki za sugestie
@solid959: Inav najpopularniejszy i aktualnie rozwijany. Znam go tylko z opowiastek i filmów na YT. Sam nie montowałem bo mam prosty GPS (bn-220) bez baro i kompasu więc sensu nie ma. No i uczę się nadal fikołków wiec wolę freestyle niż szwędanie się po niebie. Z pierwszych wrażeń wydaje mi się ze jest go trudniej skonfigurować. Ale poradników jest w pip więc na bank się da jakoś to ogarnąć.
Jak
Jak
@groznaglizda303 Crossfire w teorii 100km
Realnie pewnie 5-7 km. Ale to dla mnie i tak dużo
test Sa przystawki Crossfire do flysky.
Realnie pewnie 5-7 km. Ale to dla mnie i tak dużo
test Sa przystawki Crossfire do flysky.
mirki z #modelarstwo #modelerc moze troche #drony #rc #betaflight
zamowilem kontroler lotu, ktory ma obsluge 6 serw, poki co jednak musze sie zadowolic tym co mam - max 4 serwa.
Bedzie to zamontowane w szybowcu, brakuje mi 2 wyjsc PWM na klapy, wymyslilem sobie, ze podlacze je bezposrednio do odbiornika i bedzie to dzialac. Pytanie jest, czy duzo trace nie majac podlaczonych
zamowilem kontroler lotu, ktory ma obsluge 6 serw, poki co jednak musze sie zadowolic tym co mam - max 4 serwa.
Bedzie to zamontowane w szybowcu, brakuje mi 2 wyjsc PWM na klapy, wymyslilem sobie, ze podlacze je bezposrednio do odbiornika i bedzie to dzialac. Pytanie jest, czy duzo trace nie majac podlaczonych
@hrumque: ok, dam mu jeszcze jedna szanse, narazie jestem na etapie planowania. pytanie, czy jest widget lua do taranisa dla ardupilota?
@1392c309a2da8ca65641315bf7dc62f2: jest yapuu czy jakoś tak. Bardzo fajny.

Za co dokładnie odpowiada zakładka - Anti Gravity Gain w Betaflight?
jak powinno być ustawione?
mam Mode- smooth
wartość Anti Gravity Gain - 5 #drony #betaflight
jak powinno być ustawione?
mam Mode- smooth
wartość Anti Gravity Gain - 5 #drony #betaflight
źródło: comment_AeHxCG6X3miSNngUAXMT8IgG51DuxJ1Q.jpg
Pobierz

Wczorajszej niedzieli nie polatałem sobie, a wszystko przez to ze wgrałem do TYRO109 najnowsze oprogramowanie # Betaflight / MATEKF405 (MKF4) w wersji 4.0.6 wcześniej była 3.5.0
#dron zaraz po uzbrojeniu i dodaniu trochę "gazu" robił dzikiego flipa na plecy. Wgrałem też trochę starsza wersje i to samo. Pomogło dopiero wgranie wersji 3.5.1 która była mocniej zalecana od mojej poprzedniej.
A teraz moje pytanie dlaczego najnowsze oprogramowanie nie działa oraz czy
#dron zaraz po uzbrojeniu i dodaniu trochę "gazu" robił dzikiego flipa na plecy. Wgrałem też trochę starsza wersje i to samo. Pomogło dopiero wgranie wersji 3.5.1 która była mocniej zalecana od mojej poprzedniej.
A teraz moje pytanie dlaczego najnowsze oprogramowanie nie działa oraz czy

źródło: comment_hl9TGSwW1msOwFkQd4RRrlzfKhYYp3nL.jpg
Pobierz
@n1troo: configuration -> board and sensor alignment.
Nie mam quada pod ręką ale było to chyba +90* albo analogicznie -270.
Ale jak wgrasz ustawienia to będziesz widział czy quad na wizualizacji pochyla się tak samo jak w rzeczywistości.
Nie mam quada pod ręką ale było to chyba +90* albo analogicznie -270.
Ale jak wgrasz ustawienia to będziesz widział czy quad na wizualizacji pochyla się tak samo jak w rzeczywistości.
@uzior: co ciekawe jak w betaflight jest zakładka z motorami i tam jak zaznaczysz opcje to możesz testować ile obrotów maja, jak to włączałem to na idlle wszystkie silniki chodziły tak samo ale jak lekko gazu dodawałem to od razu widziałem o 2 tyś więcej obrotów na jednym silniku a reszta była ok więc on myślał ze jest w jakiejś innej płaszczyźnie?

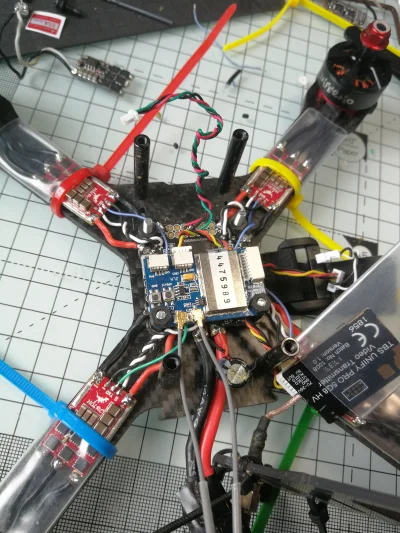
Operacja udana, pacjent czeka jeszcze na wybudzenie z narkozy I montaż kamery. Później konfiguracja #betaflight, testy filtrów RPM i wracam na niebo ;) #drony #fpv #blheli32 #hglrc
źródło: comment_gxttc06TfgzSVrTXScPAzAvGRCTFuAxu.jpg
Pobierz
@m_silvus zaliczyłem kreta, odpiąłem pakiet, sprawdzam czy wszystko ok. Podłączyłem, odsuwam się, brak reakcji na arma. Zauważyłem, że jedno śmigło lekko się ruszyło, nagle dron wystrzelił na kilka centymetrów w górę i obrócił się do góry nogami, na szczęście silniki się wyłączyły same po tej akcji. Wyszło na to, że odbiornik się spalił.
Failsafe miałem ustawiony i testowany.
Failsafe miałem ustawiony i testowany.
@zygfryd0: wooha, danger zone!

Na gearbeście wróciły w promocji za ~130zł fajne kontrolery lotu - zintegrowane z nadajnikiem, osd, pdb, F4...
https://www.gearbest.com/flight-controller/pp_625077.html
"platforma" jest zgodna softowo z Omnibus F4, i tak się to ustawia w BetaFlight/Cleanflight konfiguratorze, ale dodatkowo mamy już zintegrowany nadajnik 5.8GHz
radzę szybko, bo 65 Pieces left
Mam,
https://www.gearbest.com/flight-controller/pp_625077.html
"platforma" jest zgodna softowo z Omnibus F4, i tak się to ustawia w BetaFlight/Cleanflight konfiguratorze, ale dodatkowo mamy już zintegrowany nadajnik 5.8GHz
radzę szybko, bo 65 Pieces left
Mam,
Treść przeznaczona dla osób powyżej 18 roku życia...
@hrumque: dzięki za info, doczytałem w czasie ocokaman.
Uwaga mirki latający #drony #quadrocopter i inne #fpv na #cleanflight #betaflight 3.1.7 ma błąd poważny:
no taki malutki drobny szczególik, kto by się czepiał - quad leży na ziemi
Do not use #betaflight v3.1.7 because there's a possible "bug" or potential danger in that version that allows the motors to go full throttle right after you plug in a battery
no taki malutki drobny szczególik, kto by się czepiał - quad leży na ziemi
Mirki z kopterów i okolic - czy ktoś się orientuje, jak to jest teraz z numeracją wersji CleanFlight/BetaFlight/INAV ?
O ile od wersji Cleanflight 2.0.0 jest to dokładnie to samo, co BetaFlight (wersja 3.?) - to głównie interesuje mnie ten ostatni, teraz jest teoretycznie iNAV 1.6 - ale na której wersji cleanflight/betaflight jest on oparty?
Zasadniczo cleanflight 2.0.2 mnie bardzo zadowala, ale brak mu choćby podstawowych funkcji nawigacji - choćby do wykonania
O ile od wersji Cleanflight 2.0.0 jest to dokładnie to samo, co BetaFlight (wersja 3.?) - to głównie interesuje mnie ten ostatni, teraz jest teoretycznie iNAV 1.6 - ale na której wersji cleanflight/betaflight jest on oparty?
Zasadniczo cleanflight 2.0.2 mnie bardzo zadowala, ale brak mu choćby podstawowych funkcji nawigacji - choćby do wykonania
Tak się zastanawiam...
1. Kanał audio w transmisji FPV jest w zasadzie całkowicie bez sensu. No jest bo jest w nadajnikach, ale co - słuchać świstu łopat w kopterze, czy świstu powietrza w samolocie? Dlaczego nie jest popularnie wykorzystywany do przesyłania telemetrii (do przesyłania której odprawia się takie grube kombinacje, jak dodatkowe kable modyfikacje software, kombinacje by frsky czy flysky po ibusie zmusić do przesłania czegoś spowrotem do radia...
2. Skoro by się
1. Kanał audio w transmisji FPV jest w zasadzie całkowicie bez sensu. No jest bo jest w nadajnikach, ale co - słuchać świstu łopat w kopterze, czy świstu powietrza w samolocie? Dlaczego nie jest popularnie wykorzystywany do przesyłania telemetrii (do przesyłania której odprawia się takie grube kombinacje, jak dodatkowe kable modyfikacje software, kombinacje by frsky czy flysky po ibusie zmusić do przesłania czegoś spowrotem do radia...
2. Skoro by się

@Xava: a co jest fajnego w słuchaniu brzęczenia silników

@hrumque
@Duzy_Kotlet
Po dźwięku można ocenić stan śmigieł, ewentualne problemy przykładowo z silnikami czy nawet moc (poziom naładowania) pakietu.
@Duzy_Kotlet
Po dźwięku można ocenić stan śmigieł, ewentualne problemy przykładowo z silnikami czy nawet moc (poziom naładowania) pakietu.
#drony #qx90 #betaflight #banggood
Siema, wjechał do mnie qx90 z banggooda w wersji z transmiterem i6 eachine. Dron od początku driftował w tył i w prawo.
Na forum znazłem temat ze od którejś wersji cleanflighta ludzie mieli podobny problem, jeden nawet skwitował ze po wgraniu betaflight problem driftu znikł. Ja też tak zrobiłem licząc na szybki rezultat. Jednak sytuacja się w ogóle nie poprawiła, jest tak
Siema, wjechał do mnie qx90 z banggooda w wersji z transmiterem i6 eachine. Dron od początku driftował w tył i w prawo.
Na forum znazłem temat ze od którejś wersji cleanflighta ludzie mieli podobny problem, jeden nawet skwitował ze po wgraniu betaflight problem driftu znikł. Ja też tak zrobiłem licząc na szybki rezultat. Jednak sytuacja się w ogóle nie poprawiła, jest tak

To co opisałeś w pkt 2 w większości przypadków powinno pomóc, upewnij się.
Odnośnie pkt 1 (i ogólnie) to podłącz do komputera i sprawdź czy pokazuje wychylenia zgodne z rzeczywistością. Jeśli tak to upewnij się czy na pewno wszystkie silniki są sprawne. Pewnie z komputera możesz zadać stały poziom obrotów to daj 4x 100% i sprawdź czy generują tyle samo ciągu. Jeśli dwie kwiestie były na tak to da się tym latać
Odnośnie pkt 1 (i ogólnie) to podłącz do komputera i sprawdź czy pokazuje wychylenia zgodne z rzeczywistością. Jeśli tak to upewnij się czy na pewno wszystkie silniki są sprawne. Pewnie z komputera możesz zadać stały poziom obrotów to daj 4x 100% i sprawdź czy generują tyle samo ciągu. Jeśli dwie kwiestie były na tak to da się tym latać
@NikczemnyPan: wszystko zależy jak bardzo odlatuje w którymś kierunku bo oczywiście nigdy nie będzie tak że zostanie w miejscu. ;-) delikatnie sobie korygujesz trimem i trzeba z tym żyć, a najlepiej latać szybko bo do tego jest fpv:)
Jeśli te odchyły 0.1-0.3 w stopniach to tak, jest ok.
Odnośnie silników to miałem na myśli ze smigielkami sprawdzić, bierzesz rękę pod i czujesz czy tak samo ciągną. Ostatnio mi uciekał w jedną stronę
Jeśli te odchyły 0.1-0.3 w stopniach to tak, jest ok.
Odnośnie silników to miałem na myśli ze smigielkami sprawdzić, bierzesz rękę pod i czujesz czy tak samo ciągną. Ostatnio mi uciekał w jedną stronę
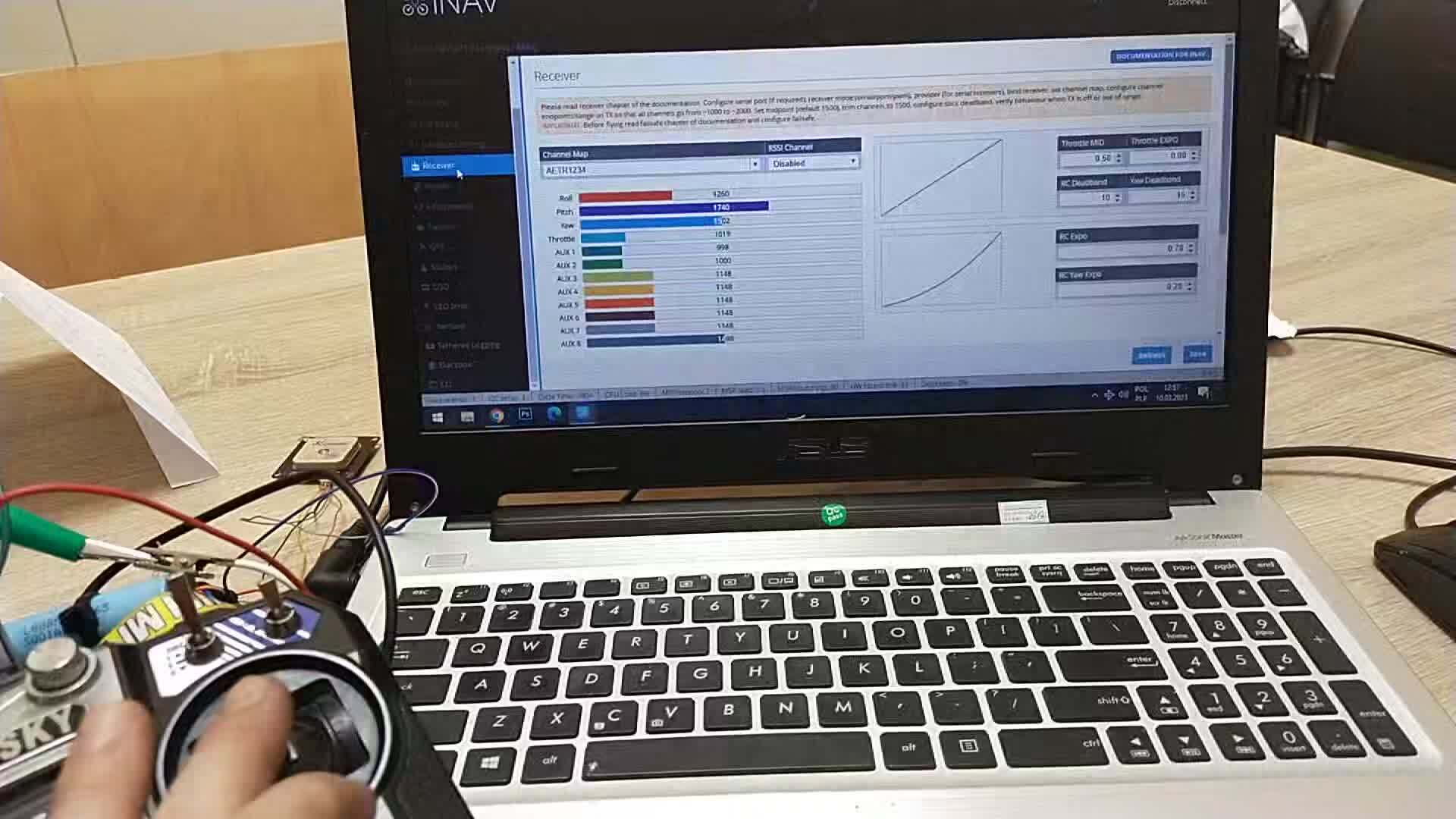
Kontroler lotu FC SPracing F3, firmware betaflight 3.0.1 / cleanflight 1.14.2
Jakby komuś przyszło do głowy dodawać malutki chiński OLED - nie ma sensu do tego FC.
po włączeniu obsługi OLED (oraz jego podłączeniu) ilość błędów i2c rośnie w tysiące, a FC po 5-30s (czasem kilku minutach) zawiesza się na twardo i zaczyna w kółko restartować. Brak możliwości podłączenia się po usb.
Najlepsza i chyba jedna rada - wgrać od nowa firmware
Jakby komuś przyszło do głowy dodawać malutki chiński OLED - nie ma sensu do tego FC.
po włączeniu obsługi OLED (oraz jego podłączeniu) ilość błędów i2c rośnie w tysiące, a FC po 5-30s (czasem kilku minutach) zawiesza się na twardo i zaczyna w kółko restartować. Brak możliwości podłączenia się po usb.
Najlepsza i chyba jedna rada - wgrać od nowa firmware

źródło: comment_5kf5u4tbG95pUgWIeu90D53MmcuxLu6C.jpg
Pobierz
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
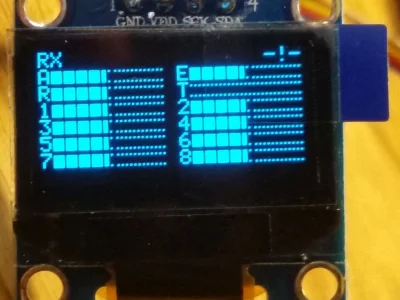
@hrumque: jaki ładny chiński oled
jaki ładny chiński oled
@Felonious_Gru: to jest "biały" i na żywo wygląda po prostu czysto biały (tutaj wyszedł trochę zimny), mam jeszcze niebieski, to ten znów na żywo wygląda tak trochę jak niebiesko-morski z wyświetlaczy lampowych , a na fotce - blady jest...
Żółty mnie jeszcze kusi... Ale żeby to dziadostwo było tak z 3x większe...
źródło: comment_wiUXUl1rwtpSxWm14Hi4DZAe1rrT6aHt.jpg
Pobierz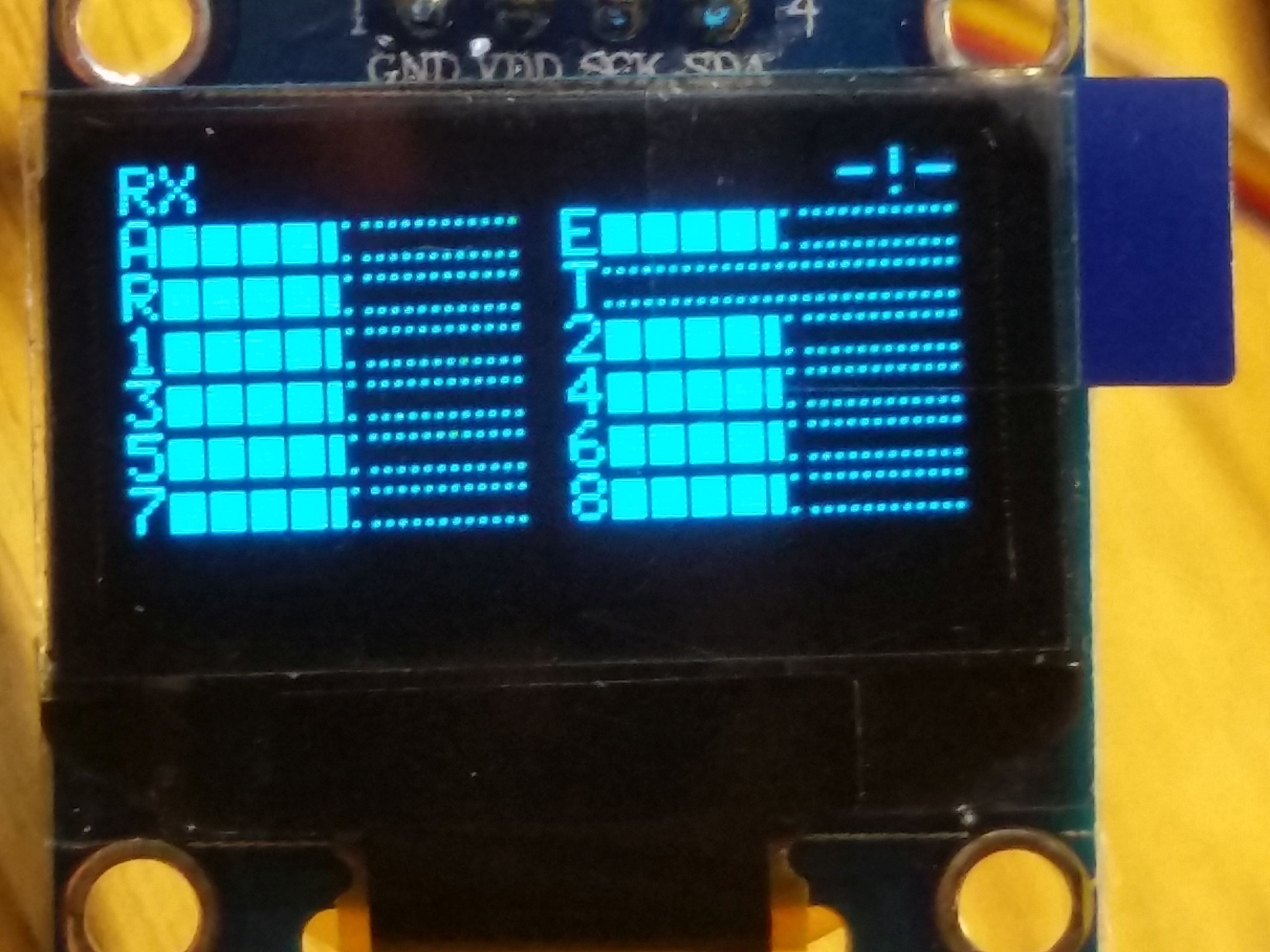{kind=link}
Ponownie atakuję bardziej doświadczonych w #drony #modelarstwo #rc i #cleanflight #betaflight - mam problem (chyba?) z cleanflight konfiguratorem 1.2.3 - wartości PIDów są tylko całkowite. Na wszystkich screenshotach w sieci - są ustawiane wartości po przecinku - u mnie wszystkie są całkowite, guzikami UP/DOWN mogę zmieniać wartość o jeden, z palca mogę wpisać cokolwiek z kropką (z przecinkiem - nie wchodzi), ale
źródło: comment_JA2fIRBI2UbT1qY08XVbSLZcyULeNlJH.jpg
Pobierz{kind=link}
@dzielus spoko. W sumia ja i tak dzisiaj ubilem swojego er250- ladowanie na stercie blach z sterczacymi srubkami itp to byl zly pomysl, prawdopodobnie cos wlazlo obok esc i kabli silnika i zrobilo zwarcie, z jednego esca i silnika pozzedl spory dym (choc nadal sie krecil i reagowal na przepustnice! Jeszcxe na tym dymiacym silniku wystartowalem i przelecialem w inne miejsce, by nie lazic po drabine). Szybko skilowalem i odpielem baterie
Jak rozumiem "Ostrzeżenie o napięciu Celi" daje komunikat "Battery Low" na HUDzie, natomiast czy "Minimalne napięcie Celi" wpływa na coś więcej niż tylko na komunikat "Land Now"? Mam wrażenie że odcina mi video po przekroczeniu tej granicy...
I czy to normalne że jak latam to po przekroczeniu granicy (10V czyli
źródło: betaflight
PobierzZacznę od tego. 3.33 oznacza wydrenowaną baterię do zera. Nie dziw się że tak szybko spada napięcie. Jak zejdzie ci poniżej 3.0 na cele to nieodwracalnie uszkodzisz sobie baterię.