Aktywne Wpisy

bober234 +968
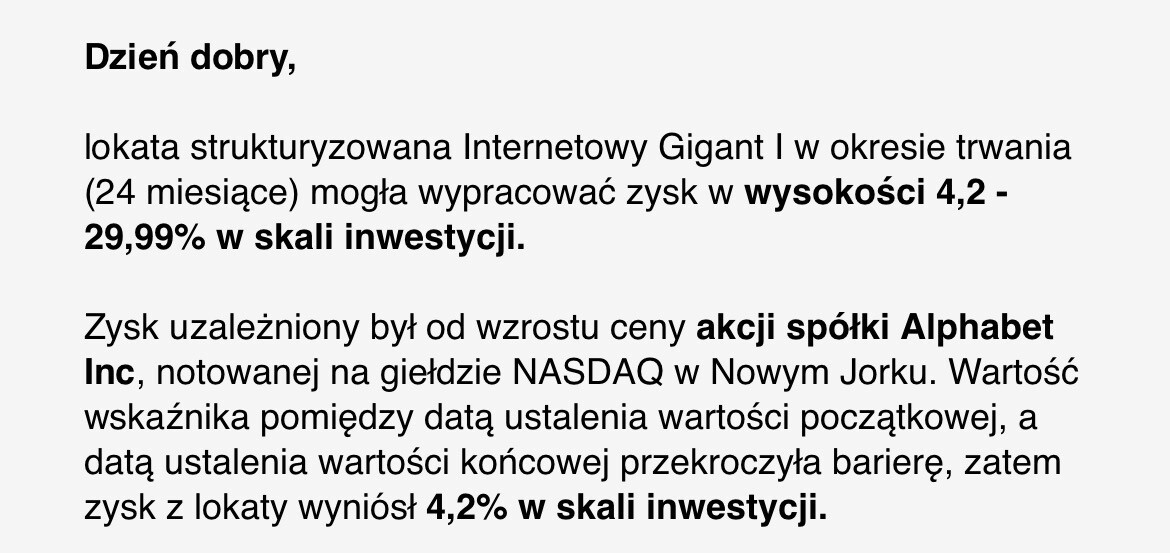
Za namową pracownika banku założyłem lokatę dwuletnią, która inwestowała moje pieniądze w akcje spółki Alphabet. Lokata miała gwarantowany zysk 4,2%, a maksymalny 30%.
W dniu otwarcia akcje Alphabet kosztowały 130 dolarów, a w dniu zamknięcia już 246. Można więc powiedzieć, że spółka urosła o około 70%.
Jakie było moje zdziwienie, gdy w piątek lokata się zakończyła, a na moje konto trafiło… tylko 4,2%.
Poniżej wklejam odpowiedź pracownika banku .
Dziś przeczytałem regulamin
W dniu otwarcia akcje Alphabet kosztowały 130 dolarów, a w dniu zamknięcia już 246. Można więc powiedzieć, że spółka urosła o około 70%.
Jakie było moje zdziwienie, gdy w piątek lokata się zakończyła, a na moje konto trafiło… tylko 4,2%.
Poniżej wklejam odpowiedź pracownika banku .
Dziś przeczytałem regulamin

źródło: image_picker_9D95E293-32D9-4EC5-A6BF-0D0155F882EA-35986-00000D4F7B3DF5F8
Pobierz
Jakby ktoś jeszcze myślał , że ten system nie jest po to by wykorzystać obywateli
zdjęcie zrobione 20 min temu
#systemkaucyjny #aldi
zdjęcie zrobione 20 min temu
#systemkaucyjny #aldi
źródło: image
Pobierz




{kind=link}
{kind=link}
Czym może być spowodowane tak dziwne zachowanie pętli? Zamiast próbować osiągnąć setpoint, zatrzymuje się na innym poziomie i zaczyna oscylować jednocześnie spadając. Gdyby nie koniec syngału, wartość spadałaby w nieskończoność.
Taki problem pojawia się po wprowadzeniu limitów saturacji siłownika. To nie wind-up, bo zastosowałem clamping.
źródło: comment_erBCORBrfhMKdgLojRFY6jrYUh2YAvRT.jpg
Pobierzźródło: comment_VU9V7ozM0zU2yGKNdC9efI00VEdKkDwW.jpg
Pobierzźródło: comment_SkZFkcSV74LDPC9ZJrmqfcZnL8YOwV7m.jpg
Pobierzźródło: comment_5gaNdquTm42wyBzMd6OExGR9O0xbjgTk.jpg
Pobierzźródło: comment_eqt5DxSwpSUPDt5bPLszFoM1wU70Ba6H.jpg
Pobierzźródło: comment_H46sqvhbxQGKb1RsiUaQhTNDRwn9Xj7A.jpg
Pobierz