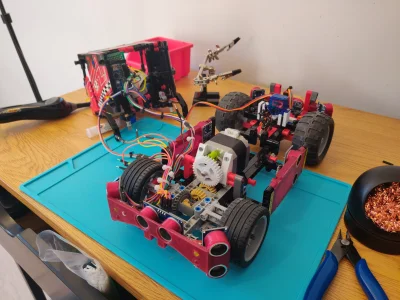
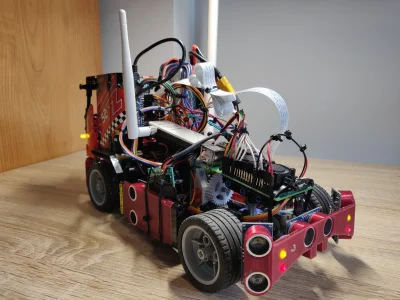
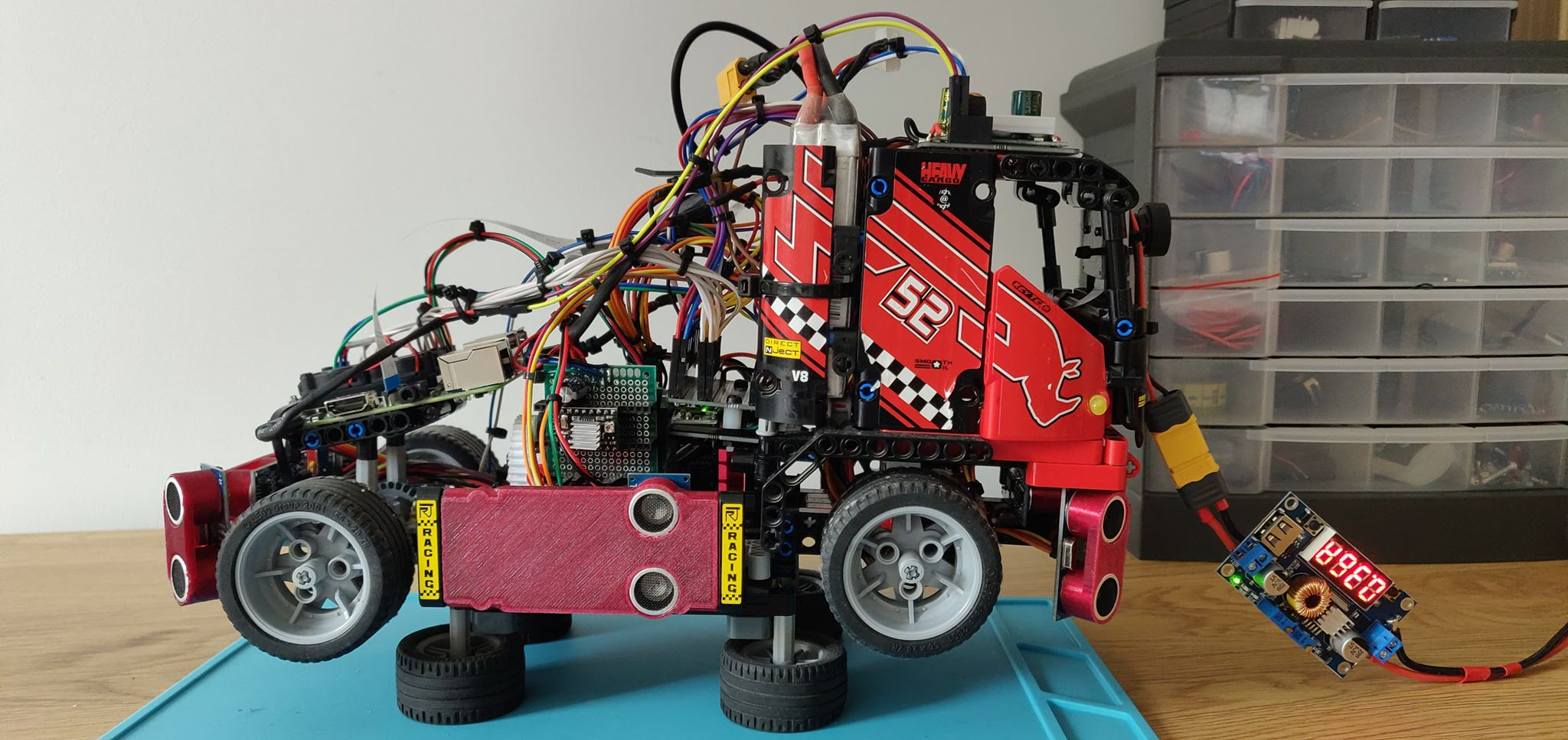
skończyłem wczoraj wszystko podłączać. zmiany w konstrukcji to podwyższenie kabiny o jeden klocek, dzięki temu mogłem dać większe koła. zrównoważyło to pochylenie do przodu które było wcześniej. mógł to być też powód czemu czujniki czasami dawały dziwne pomiary, trzeba pamiętać że mają one zakres "widzenia" 15 stopni. do tego pochylone do przodu i mogły zbierać odczyty z ziemi przypadkowo. zobaczę jak teraz będzie. wyższe koła też pozwalają najeżdżać na progi bez uszkodzenia
Autor
Najnowsze
Archiwum

mapache

zerathul
@mapache: a bo sam sobie zrobiłem że wrzucam na rpi nowy szkic do wgrania na arduino po czym bezpośrednio po ssh wgrywam
mapache
@zerathul: kodu po stronie arduino nie modyfikuje, jest prosty jak budowa cepa. skończyłem go, wrzuciłem i nie ruszam
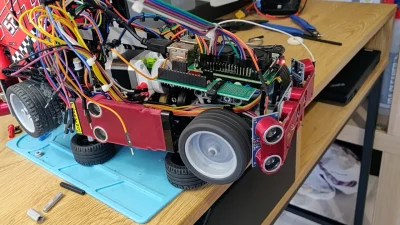
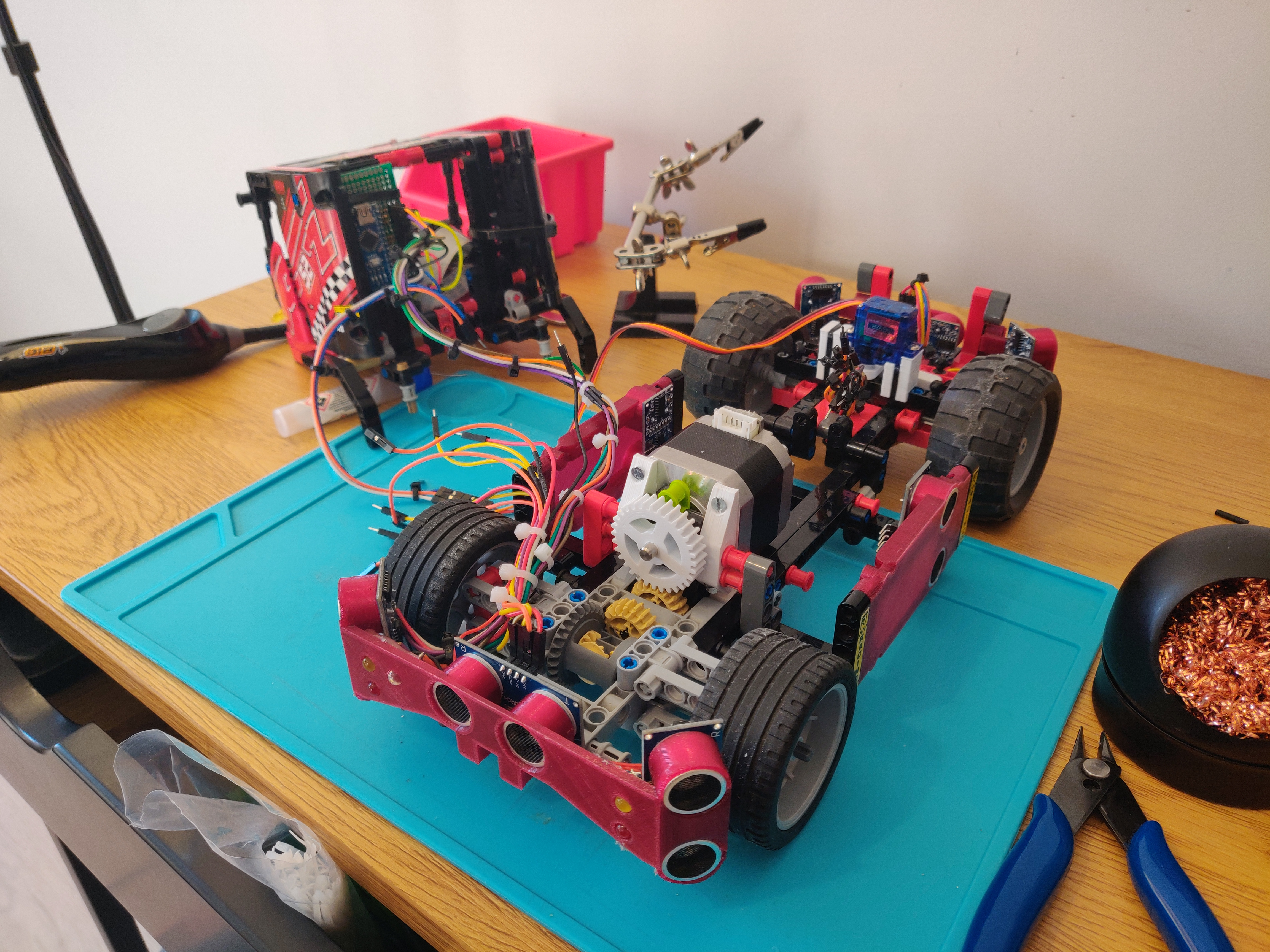
poprawiam elektrykę. rezygnuje z robienia "przedłużek" przewodów czyli łączeniem ich stykami. potrafią się rozłączać. do tego zmieniam trochę układ zasilania. ogólnie redukcje kabli robie i płytej. zmieniłem też sterownik silnika na DRV8825. chodzi jak marzenie, calkowicie inna kultura pracy silnika w porównaniu do poprzedniego A4988
#malinoweauto
#malinoweauto
źródło: comment_1590426565mcLHyg3aJybvDaLEKq7r6D.jpg
Pobierz
@mapache ja lubię używać złączy ARK, chociaż u ciebie mogą okazać się za duże
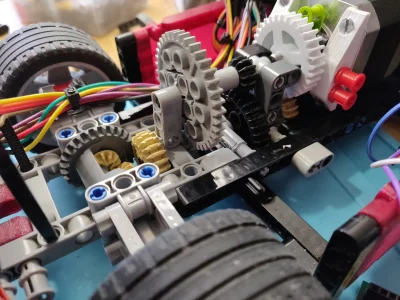
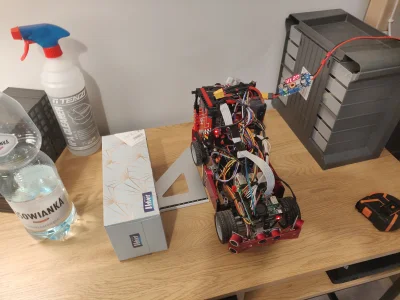
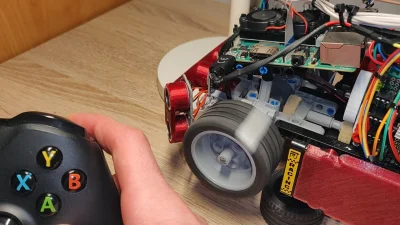
niektórzy mówili że auto wolne jest. więc zrobiłem przekładnie ( ͡° ͜ʖ ͡°) tylko teraz sprawdzic czy silnik sobie w ogole poradzi na ziemi
#malinoweauto #lego
#malinoweauto #lego

Teraz będziesz szpanował przed kolegami, że arduino użyłeś w zabawce? #pdk
porcja filmików z wczoraj. walcze teraz z race condition. troche sie zapomnialem i mam juz tak gigantyczne zmiany jak na jednego commita ze jak cos sie z----e to bedzie trudno naprawic. udalo mi sie zjechac z 25% uzycia CPU na 13%. pomiary czujników też lepsze i bardziej optymalne
#malinoweauto
#malinoweauto

.

@m0d3_m4_d0wna: ucieka tylko jesli przeszkoda jest blizej niz wyhamuje. ucieka w strone gdzie ma wiecej miejsca
Treść przeznaczona dla osób powyżej 18 roku życia...


mała migawka czym się teraz zajmuje
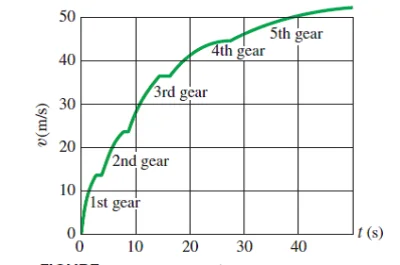
robię system bezpieczeństwa auta. nadrzędny do wszystkich który będzie hamował lub uniemożliwiał jazdę w danym kierunku jeśli jest przeszkoda. póki co pomysł jest by droga bezpieczna od przeszkody była zależna od prędkości. znam droge hamowania przy maks prędkości więc liczę proporcjonalnie ją do aktualnej. dodatkowo staram się dobrać parametry pomiarów tao by były one na tyle często by wszystko działało a na tyle rzadko by nie
robię system bezpieczeństwa auta. nadrzędny do wszystkich który będzie hamował lub uniemożliwiał jazdę w danym kierunku jeśli jest przeszkoda. póki co pomysł jest by droga bezpieczna od przeszkody była zależna od prędkości. znam droge hamowania przy maks prędkości więc liczę proporcjonalnie ją do aktualnej. dodatkowo staram się dobrać parametry pomiarów tao by były one na tyle często by wszystko działało a na tyle rzadko by nie

tu sie bawiłem poślizgiem by sprawdzić czy może ABS zrobić


@mapache: Miałbyś dokładną informacje czy ilości pingów z czujnika pokrywa się ze spodziewanym wynikiem dla danej prędkości obrotowej silnika, podobnie z ABS-em, łatwo wykryć czy koła stanęły. Co do sterownika krokowego to się nie wypowiem, używałem pythona + l293d :(
mały update. ulepszyłem sterowanie manualne padem. wcześniej bywały problemy takie że np nie wychwytywało że trigger na padzie wrócił na punkt zerowy. jakoś no ten imput był pomijany gdzieś się gubił czy coś. nie wiem bo ciężko mi było odtworzyć taką sytuacje ale się zdarzała. powodowało to że auto się nie zatrzymywało i myślało że ciągle ma wciśnięty gaz i jechało. dopiero po czasie się zatrzymywało. problem rozwiązałem w ten sposób że
mam już obsługę czujnik odległości, częściowo bo jeszcze mam w planach parę rzeczy. przeszedłem dosyć długą drogę prób i błędów by to działało tak jak chcę. Słowem wstępu jeszcze są to czujniki ultrasoniczne, mają dwa piny które tutaj mnie interesują, trigger i echo. trigger nadaje sygnał dźwiękowy, a echo daje mi sygnał zwrotny w postaci stanu wysokiego, czas stanu wysokiego oznacza czas jaki potrzebował dźwięk od wyjścia do wrócenia do czujnika. Więc

@mapache: najbardziej d------a fura na Mirko!
@mapache: To ja pojadę klasykiem ( ͡° ͜ʖ ͡°)
Widzę, że jesteś dumny ze swojego projektu. Ale może wyjaśnisz z czego? Z tego, że Arduino użyłeś w samochodziku? Przerost formy nad treścią. Ale przed kolegami będziesz szpanował jaki to ty (specjalnie z małej litery) masz pojazd. Może byś lepiej wykorzystał Arduino?
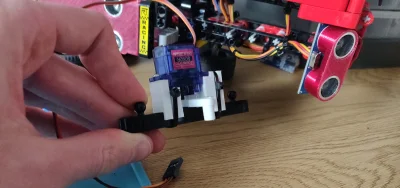
idąc za radę @rmerrorlog wstawiłem konwerter logiczny 3.3V/5V. do tego mocniejsze serwo. już z dwa dni podpinam wszystko do kupy
#malinoweauto
#malinoweauto
źródło: comment_1586536260x5eto7mjAL2SSwouVNbJ8q.jpg
Pobierzserwo
źródło: comment_1586538591XH2DbKWDsaDaQWe1edgDuN.jpg
Pobierz@mapache Zajrzałeś do dokumentacji, części układów 5V łyka bez problemu na wejściu 3.3V (zazwyczaj od 2.9V uznając logiczny stan wysoki) (・へ・)
póki co wszystko idzie jak burza (ʘ‿ʘ) mam pierwsze odczytu z czujników odległości. problem jest tylko taki że to są nanjtańsze czujniki. dla rozjaśnienia na początek wytłumacze jak działają. są to czujniki ultrasoniczne. czylu działają wysyłając falę i odbierając gdy wróci odbita od przeszkody. znają prędkość dźwięku i czas jaki był od wysłania do odbioru obliczymy odległość. więc mam na czunikach dwa piny, jeden to trigger który triggeruje
źródło: comment_1586209994bRnz6RzjQsR7RMrcnwuKPT.jpg
Pobierz@rmerrorlog: w symie nawet nie zwróciłem na to uwagi ( ͡° ͜ʖ ͡°) mógłbyn użyc konwertera logiki. ale póki co wszystko działa i nie było problemów
@spinel: ciężko mi powiedzieć ile czasu mi zajmie cała reszta, bo chociażby nigdy nie bawiłem się w przetwarzanie obrazu więc nie wiem czy szybko się tego nauczę czy też i nie. ale no pewnie tak z 5/10% mam. bo dosłownie no mam tylko jazde manualną, to jest nic jeszcze.
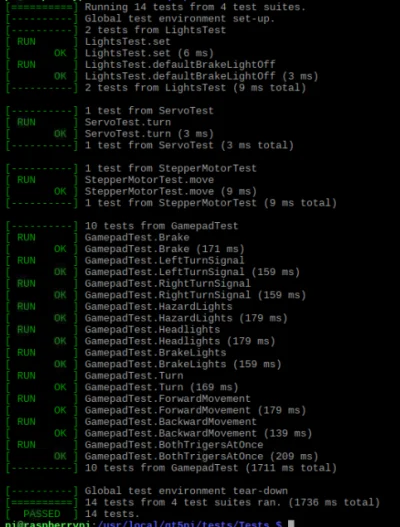
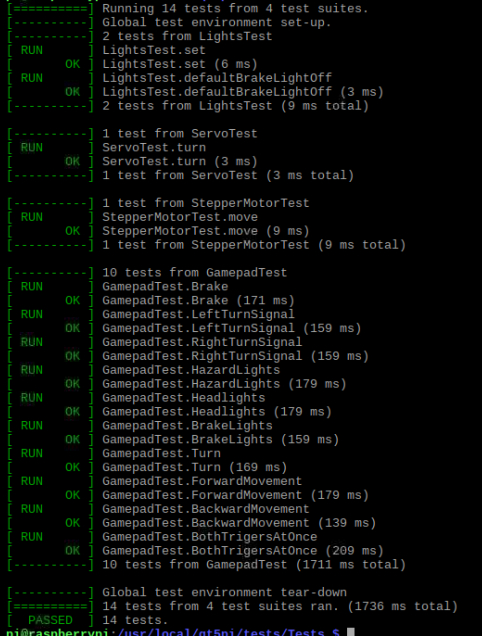
co do testów to korzystamy w pracy z tego google testów. więc coś tam umiałem. z tym że w pracy to
co do testów to korzystamy w pracy z tego google testów. więc coś tam umiałem. z tym że w pracy to
więc prezentuje rozwiązanie problemu słabego serwa. wcześniej jak wielu z was zauważyło koła nie wracały idealnie na środek przez co auto lekko ciągle skręcało. udało mi się to rozwiązać softwerowo. rozwiązanie polega na tym że jeśli koła wracają na środek to jest odpalany wątek z timerem, jeśli nie będzie nowego inputu do skrętu kół to jest dodawany dodatkowy offset który ustawia fizycznie koła na środku a następie znowu na zero. jeżeli pojawi

.


świętuje mały sukces. udało mi się rozwiązać problem słabego serwa, konkretnie to ze serwo nie wraca idealnie na środek. udało mi się rozwiązać to programowo. mimo wszystko będę musiał pomyśleć o jakimś lepszym serwie, samo auto warzy 1.2kg, do tego guma z opon daje opór i serwo trochę wymięka. chcę uniknąć prac hardwerowych w aucie bo jest to dosyć czasochłonne i odciąga mnie od pisania. montaż lepszego serwa to jest projektowanie nowego
źródło: comment_1586121270vOQ90T8UW7i17ROfxQ0Ep0.gif
Pobierz
@mapache: Hej bardzo fajny projekt. Czym jest zasilany (paluszki, baterie modelarskie czy może jakaś samoróbka)?
@rmerrorlog: LiPo 11.1V 1800mah
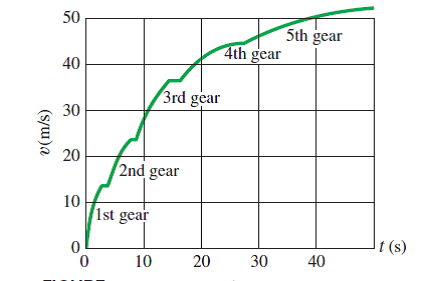
Dodałem przyśpieszenie. Wcześniej prędkość była nadawana 1:1 z triggera w padzie, znaczy się oczywiście skalowana ale pozycja oznaczała daną prędkość jaką ma nadać w danym momencie. Powodowało to że jeśli się dała zbyt dużą prędkość bez rozpędzenia to silnik gubił kroki, co objawia się charakterystycznym dźwiękiem jak i brakiem ruchu. Można to usłyszeć na filmie. Dla demonstracji pod przyciskiem A umieściłem załączanie funkcji przyśpieszenia. Próbując się wzorować na prawdziwych samochodach przyśpieszenie rośnie

update statusu
Jednak projekt dalej będę prowadzić sam. Zmieniłem trochę połączenia w aucie, zmieniłem moduł zasilania 5V na inny jak i zasilam znowu RPi po złączu USB. wcześniej miałem wpięte pod GPIO ale potrafiło się RPi restartować radnomowo. Zmiana ta rozwiązała problem. Przeniosłem też moduły które miałem umieszczone na bokach auta by nie było trytek.
Z programowej strony. Dodałem logi, są 3 typy.
-Info: poprostu info co się dzieje
Jednak projekt dalej będę prowadzić sam. Zmieniłem trochę połączenia w aucie, zmieniłem moduł zasilania 5V na inny jak i zasilam znowu RPi po złączu USB. wcześniej miałem wpięte pod GPIO ale potrafiło się RPi restartować radnomowo. Zmiana ta rozwiązała problem. Przeniosłem też moduły które miałem umieszczone na bokach auta by nie było trytek.
Z programowej strony. Dodałem logi, są 3 typy.
-Info: poprostu info co się dzieje

źródło: comment_1585486856bHPdGUBlq933JaGb1ElKb1.jpg
Pobierztesty
źródło: comment_1585487284JOjvOAZyHvESdik3k4eWUQ.jpg
Pobierzprzykładowe logi podczas startu auta i wyjścia
[Info]in SerialPort, initializing constructor
[Info]in SerialPort::open_comport(): Arduino found
[Info]in Servo, initializing constructor
[Info]in Servo::validateAngle(): Angle valid = 0ruszam pownownie z projektem po małej przerwie. tym razem już nie sam, współlokator dołączył. od ostatniego wpisu nic nowego nie zrobiłem, nawet nie mergowałem zmian. dodałem tylko zewnętrzną kartę sieciową by pojazd nie musiał się łączyć z siecią by móc go obsługiwać. tworzy własną sieć.
mamy postawioną już Jire i Gerrita. Backlog jest rozpisany w komentarzu. W weekend otwieramy sprint. Sprinty będą po 3 tygodnie. Zastanawiam się jeszcze co wykorzystać do testów,
mamy postawioną już Jire i Gerrita. Backlog jest rozpisany w komentarzu. W weekend otwieramy sprint. Sprinty będą po 3 tygodnie. Zastanawiam się jeszcze co wykorzystać do testów,
źródło: comment_1582119084RNPZ7UzEYuC8bZN8NWqOHS.jpg
PobierzBacklog. jeszcze nie finalna wersja
źródło: comment_15821191289SjwQdX6NTuhHYcI9VrPW2.jpg
Pobierz
A więc...wyczyściłem kod, stworzyłem klasy do sterowania światłami jak i serwem które są w Arduino.
- Kierunkowskazy włączamy RMB lub LMB, oba na raz to awaryjne, by wyłączyć awaryjne wystarczy wcisnąć RMB lub LMB
- Tylne światła do jazdy dziennej, włączane i wyłączane strzałką w dół
- Światła hamowania które się pojawiają gdy się hamuje, następnie wracają do pozycji wyłączonej lub świateł dziennych zależnie od ustawienia
- Przednie światła do jazdy dziennej i drogowe, przełączanie
- Kierunkowskazy włączamy RMB lub LMB, oba na raz to awaryjne, by wyłączyć awaryjne wystarczy wcisnąć RMB lub LMB
- Tylne światła do jazdy dziennej, włączane i wyłączane strzałką w dół
- Światła hamowania które się pojawiają gdy się hamuje, następnie wracają do pozycji wyłączonej lub świateł dziennych zależnie od ustawienia
- Przednie światła do jazdy dziennej i drogowe, przełączanie


@mapache: wrzucisz kod na githuba?

Auto już skręca(⌐ ͡■ ͜ʖ ͡■)
Kod po stronie Arduino jest gotowy i działa. Obsługuje ono taki funkcje jak:
-Kierunkowskaz
Kod po stronie Arduino jest gotowy i działa. Obsługuje ono taki funkcje jak:
-Kierunkowskaz

@revoolution: żeby głupi mógł zapytać

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@mapache: i co, moze jeszcze jestes dumny ze swojego projektu arduino?
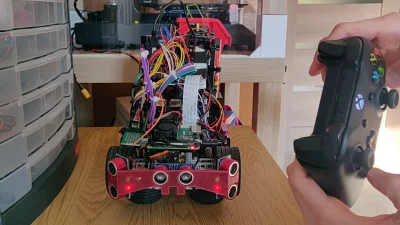
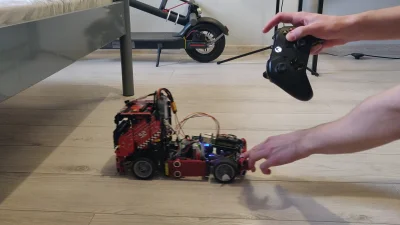
osiągnąłem kolejny kamień milowy w projekcie. Auto ruszyło ( ͡° ͜ʖ ͡°)
Kontrola odbywa się za pomocą pada od Xbox One który się komunikuje z RPi po Bluetooth. Projekt piszę w QtCreator by mieć dostęp do ich bibliotek bym mógł napisać aplikacje okienkową by ładnie interpretować wszystkie dane jakie zbieram i komunikaty. No i dodatkowo jest cross-compile, czyli kompiluje będąc na swoim ubuntu na RPi i tam też jest program z automatu
Kontrola odbywa się za pomocą pada od Xbox One który się komunikuje z RPi po Bluetooth. Projekt piszę w QtCreator by mieć dostęp do ich bibliotek bym mógł napisać aplikacje okienkową by ładnie interpretować wszystkie dane jakie zbieram i komunikaty. No i dodatkowo jest cross-compile, czyli kompiluje będąc na swoim ubuntu na RPi i tam też jest program z automatu

Hamulec po naciśnięciu X
@kamilosxd678: https://mechatronicsblog.com/cross-compile-and-deploy-qt-5-12-for-raspberry-pi/
ten poradnik mi pomógł. ja zrobiłem na najnwoszym QT i działa
ten poradnik mi pomógł. ja zrobiłem na najnwoszym QT i działa