
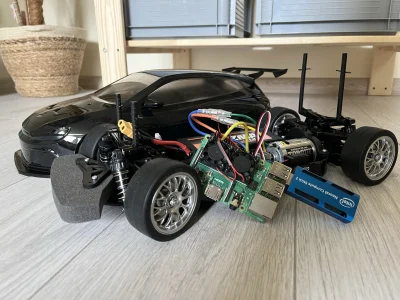
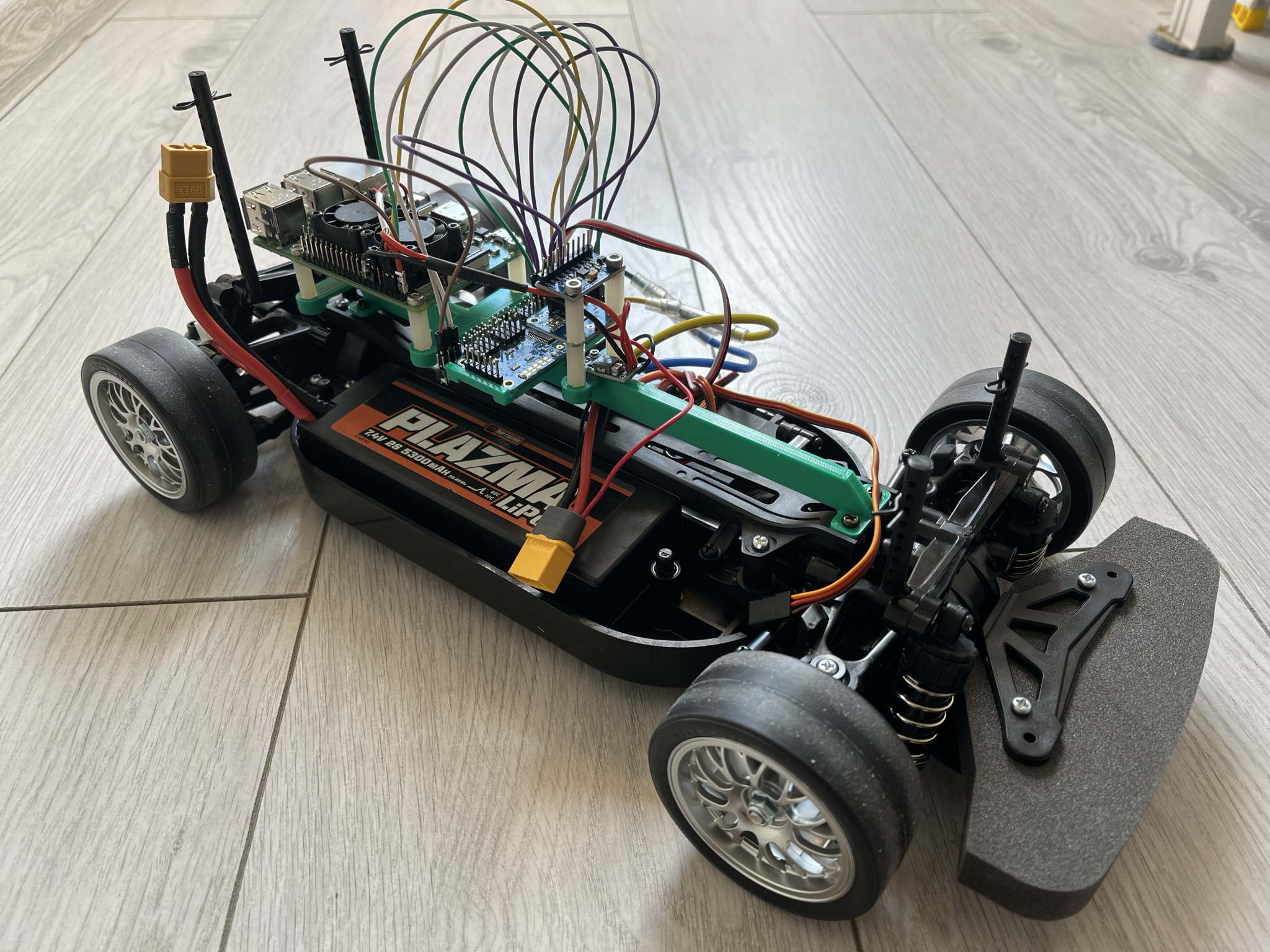
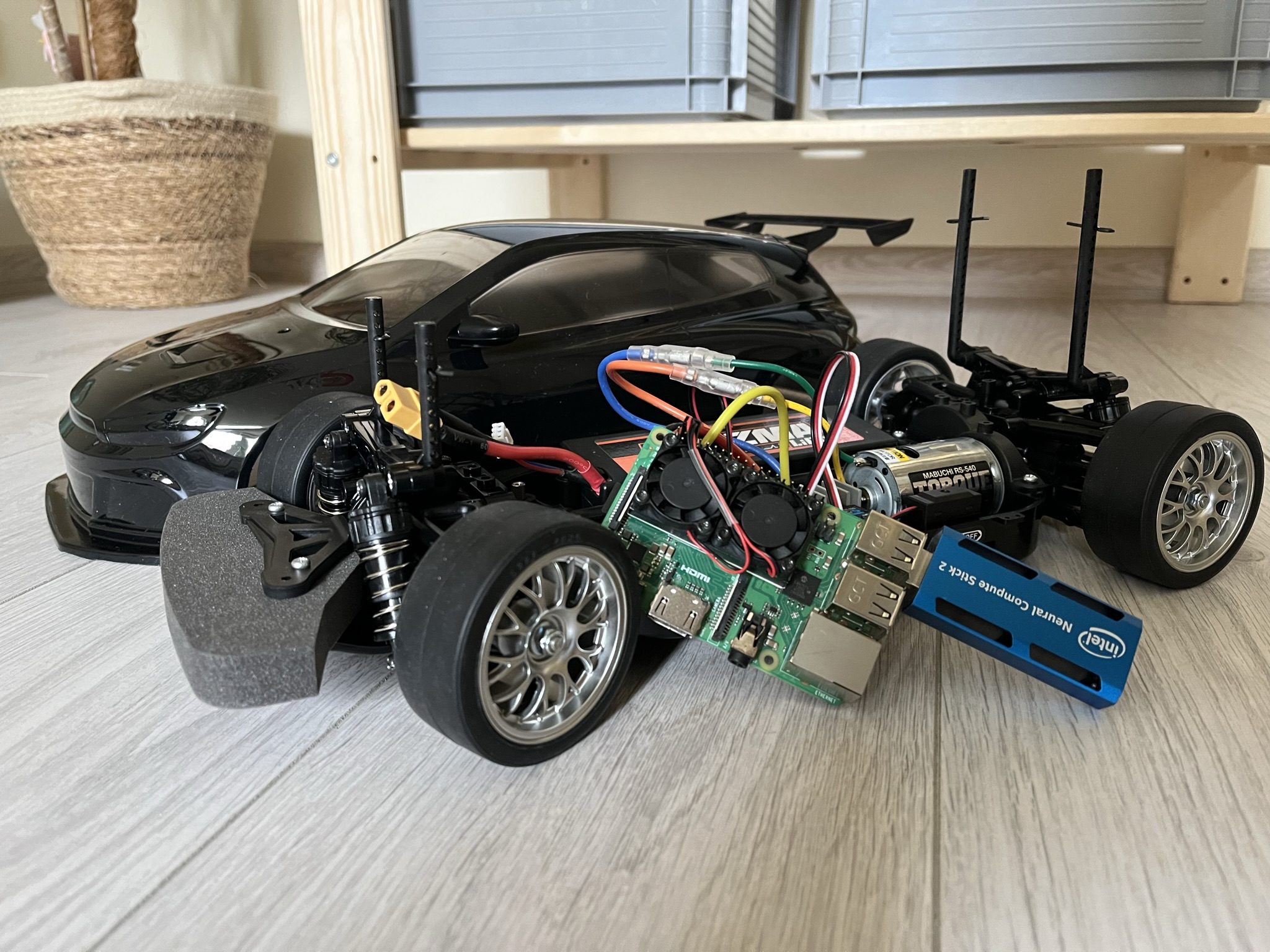
kolejna iteracja #malinoweauto (bardziej już JetsonAuto). tym razem sprzęt zrobiony na tip top by nie było że znowu się coś spieprzy i rzucę w kąt na kolejny rok. udało mi się znaleźć model podwozia w formacie STEP co mega ułatwiło pracę na modelu by zaprojektować montaże. całość oparłem o szynę w którą wchodzi nakrętka, dzięki czemu całość jest modularna. poprzednio to było stelaż, jak coś się zmieniło to całość od
Autor
Najnowsze
Archiwum


mój stary to fanatyk Jetsonów ( ͡° ͜ʖ ͡°)
udało mi się kupić drugą sztukę, tym razem 4Gb
#malinoweauto #chwalesie
udało mi się kupić drugą sztukę, tym razem 4Gb
#malinoweauto #chwalesie

źródło: comment_1671124207hvZzEioE6yesQVAGU3gIaT.jpg
Pobierzudało mi się dostać Jetsona Nano! długo czekałem by kupić jakiegoś, ale albo nie było żadnego dostępnego albo chore ceny. tą sztukę dorwałem jako używkę za 300zł. Niestety jest to jedna z pierwszych wersji i ma złącze do zasilania USB C zamiast okrągłego DC jak mają teraz, będą zasilał przez piny GPIO. jest to dla mnie spory krok na przód, bo Jeston ma o wiele lepsze wsparcie do AI niż Intel NCS2

źródło: comment_1670430210LIDUq243FMqw8G45Fb7AZd.jpg
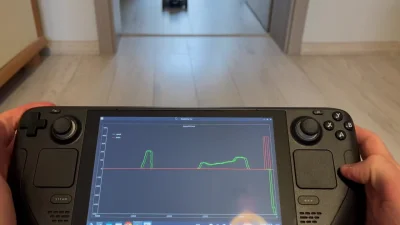
Pobierzdodałem wykres napięcia, oraz duży tekst obok z napięciem jak i podgląd z kamery nad dole. można zauważyć dość duże opóźnienie, jest to spowodowane tym że z RPi lecą zwykłe JPG po TCP. na ten moment nie przejmuję się tym, bo jazda na podglądzie nie jest celem tego projektu, a podgląd ma być tylko dla mnie debugowy by widzieć co auto "myśli". gdy uporządkuje kod postaram się zrobić jakiegoś prostego line followera

@Bielecki: czemu niby python za wolny? przecież opóźnienie to kwestia transmisji a nie języka, python wcale nie jest o tyle wolniejszy zeby bylo widac różnice na poziomie takich prostych obliczeń

@mapache: kurde ja już 3 rok się jaram tym językiem, jak czasem skrobię w JS to zawsze doceniam mojego węża :D. Można mu pewnie wiele zarzucić, ale syfiastosc? Mało który kod można tak pięknie napisać i opisać.
Ostatnio taplam się w RUST, czas pisania kodu X10 w porównania do pythona, ale jak już napiszesz to kompilacja i runtime to bajka.
Stosunkowo łatwo też napisać bibliotekę do intensywnych prac w RUST
Ostatnio taplam się w RUST, czas pisania kodu X10 w porównania do pythona, ale jak już napiszesz to kompilacja i runtime to bajka.
Stosunkowo łatwo też napisać bibliotekę do intensywnych prac w RUST
mam ponownie wenę
zmieniłem sposób sterowania autem. wcześniej odbywało się to poprzez pad od Xboxa podłaczonego po BT do RPi. teraz jest to robione za pomocą sieci lokalne,. Mogę albo używać do tego SteamDecka, który wysyła swój input poprzez wiadomości, lub też przez dowolny komputer z podpiętym padem od Xbox.
naprawiłem rysowanie wykresu. wcześniej miałem problem że apka się wywalała, było to spowodowane wywoływaniem funkcji zmiany elementów okna spoza wątku głównego
dodałem
zmieniłem sposób sterowania autem. wcześniej odbywało się to poprzez pad od Xboxa podłaczonego po BT do RPi. teraz jest to robione za pomocą sieci lokalne,. Mogę albo używać do tego SteamDecka, który wysyła swój input poprzez wiadomości, lub też przez dowolny komputer z podpiętym padem od Xbox.
naprawiłem rysowanie wykresu. wcześniej miałem problem że apka się wywalała, było to spowodowane wywoływaniem funkcji zmiany elementów okna spoza wątku głównego
dodałem


ogarniam dalej apke pomocniczą na PC. pracuje nad stworzeniem w miarę uniwersalnej klasy wykresu, który będzie się mógł aktualizować na bieżąco i dodatkowo pokazuje tylko dane sprzed 10 sekund. gdy to zrobię to dodam wysyłanie całej reszty danych takich jak jaki jest aktualny kąt skrętu, napięcie baterii i inne
#malinoweauto
#malinoweauto
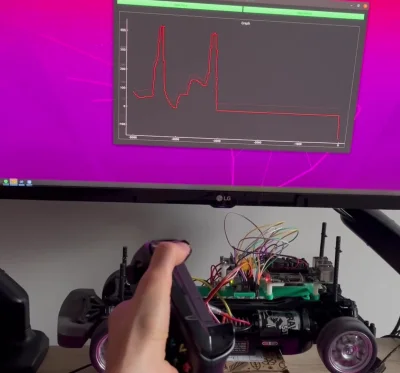

udało mi się w miarę ogarnąć komunikacje RPi -> Komputer poprzez UDP. niestety z jakiegoś powodu zrywa połączenie po jakiś 10 sekundach. Na filmie trochę upośledzone rysowanie wykresu prędkości i czasu na podstawie wiadomości z RPi
#malinoweauto
#malinoweauto

dopracowałem logikę sterowania i kombinacji guzików.
ale mam problem z serwem i tu pytanie do #elektronika. Potrafi "drgać" jak ma się szybko poruszyć na jakąś pozycji. np z skrajnej na środek. nie jest to spowodowane samym sterowaniem pada i drżeniem gałki analogowej bo sprawdziłem jakie wartości idą i po za tym mam ustawiony deadzone. wygląda jakby to PID serwa był jakoś źle ustawiony, jest to możliwe? Serwo to jest
ale mam problem z serwem i tu pytanie do #elektronika. Potrafi "drgać" jak ma się szybko poruszyć na jakąś pozycji. np z skrajnej na środek. nie jest to spowodowane samym sterowaniem pada i drżeniem gałki analogowej bo sprawdziłem jakie wartości idą i po za tym mam ustawiony deadzone. wygląda jakby to PID serwa był jakoś źle ustawiony, jest to możliwe? Serwo to jest

dodałem wsteczny i hamulec. hamulec jest pod RT, a gdy się wciśnie RB to wtedy jest wsteczny. trochę mi się nie podoba implementacja hamulca. bo ogólnie jak się jeździ na zwykłym pilocie to jest tak że za pierwszym razem jak się da "cofanie" to wtedy jest hamulec, drugi raz to cofanie. by był znowu hamulec, trzeba pojechać do przodu. w związku z tym tutaj musiałem zrobić podobnie, i gdy naciskam sam hamulec


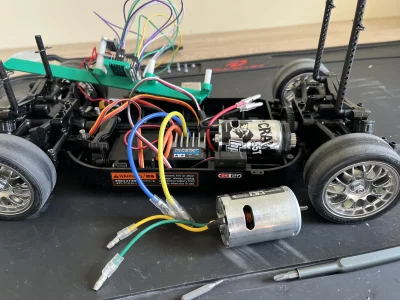
test nowego silnika. jest wolniejszy i da się sensownie nim manewrować, mógłby być nawet jeszcze wolniejszy
#malinoweauto
#malinoweauto

@Tokolegakolegi: finalny po aktualnych cenach? jak mam strzelać to z 2.5k będzie jak jeszcze Lidar kupie
@Bielecki: dopóki nie robię mocnych zrywów albo nie latam bokiem to jest spoko. nawet podoba mi się to że się ślizga. będzie okazja by zaimplementować jakiś rodzaj ABS i zapobieganie zderzeniom. coś podobnego robiłem w poprzedniej wersji, że jeśli auto widziało że jest spora szansa że przywali to ma odbijać
liczę na to że dzisiaj już będzie można latać bokiem. jutro wstawię silnik od wiertarki by dało się jakoś sensownie i precyzyjnie manewrować
#malinoweauto
#malinoweauto


ogarnąłem już serwo i częściowo ESC. muszę dodać wsteczny i hamulec. następnie będzie sterowanie padem
#malinoweauto
#malinoweauto


@VintageRock: Tamiya TT-01E
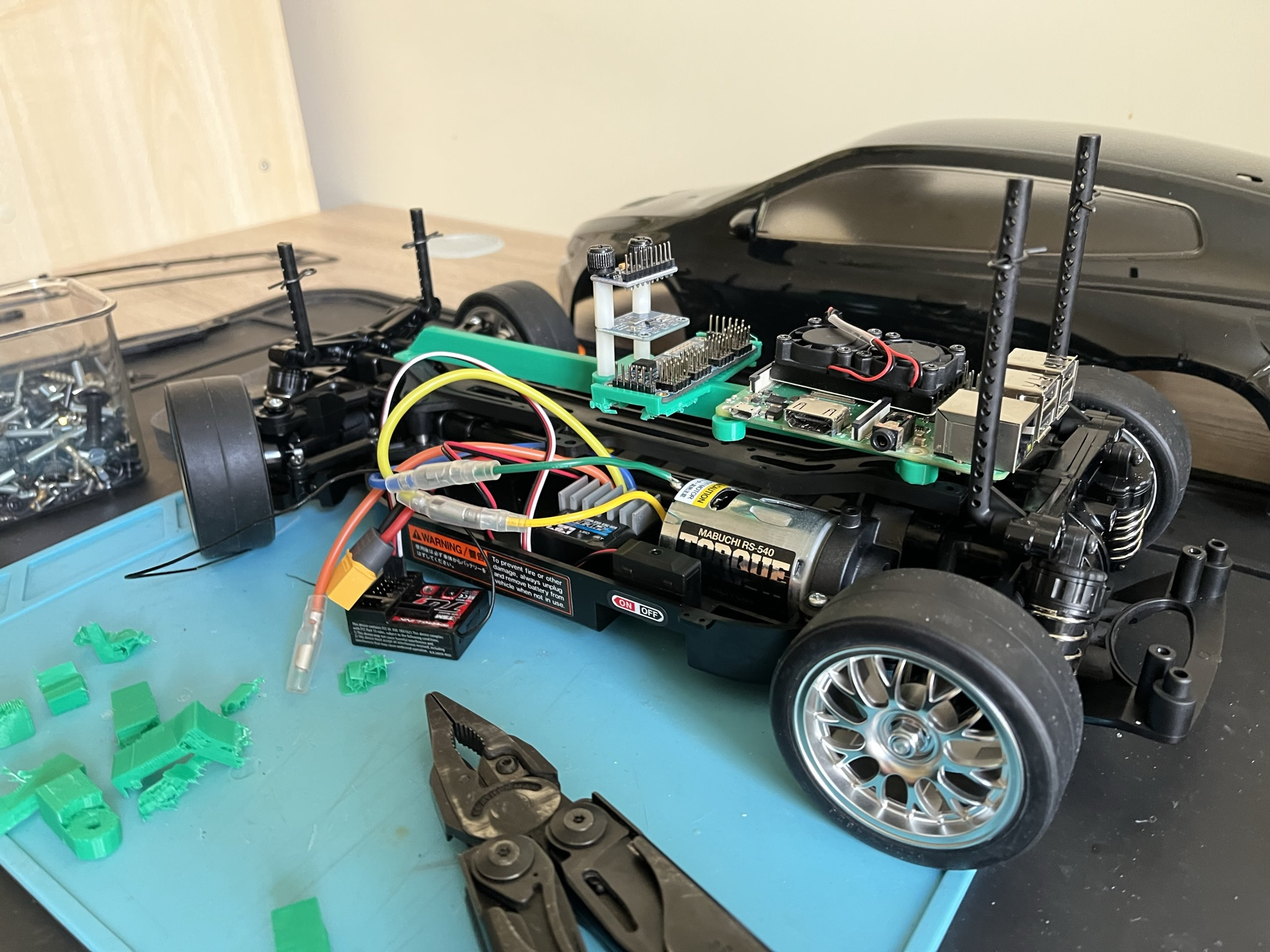
wczoraj mi doszły gwinty i śrubki (zawsze to było moje marzenie mieć taki zestaw ( ͡° ͜ʖ ͡°)). gwinty bardzo łatwo się montuje, są super. wszystko poskręcałem i pomontowałem. póki co podłączyłem tylko sterownik PWM i czujnik napięcia. wygląda na to że silnik będzie do wymiany, zbyt wysokie obroty ma. mogę zapomnieć by w ogóle parkować na nim, potrzebuje silnika podobnego co mam w swoim Bronco. pewnie wezmę

źródło: comment_1654853282t2hmjAO3P4oQbZEMyagPCg.jpg
Pobierz

żmudna robota. ale serwo już zamontowane. czekam aż dojdą śruby i gwinty
VW nie przyklejam bo mnie nie sponsorują ( ͡° ͜ʖ ͡°)
#malinoweauto
VW nie przyklejam bo mnie nie sponsorują ( ͡° ͜ʖ ͡°)
#malinoweauto

źródło: comment_1654706078E2B9YExfIMspZbpN9YOk82.jpg
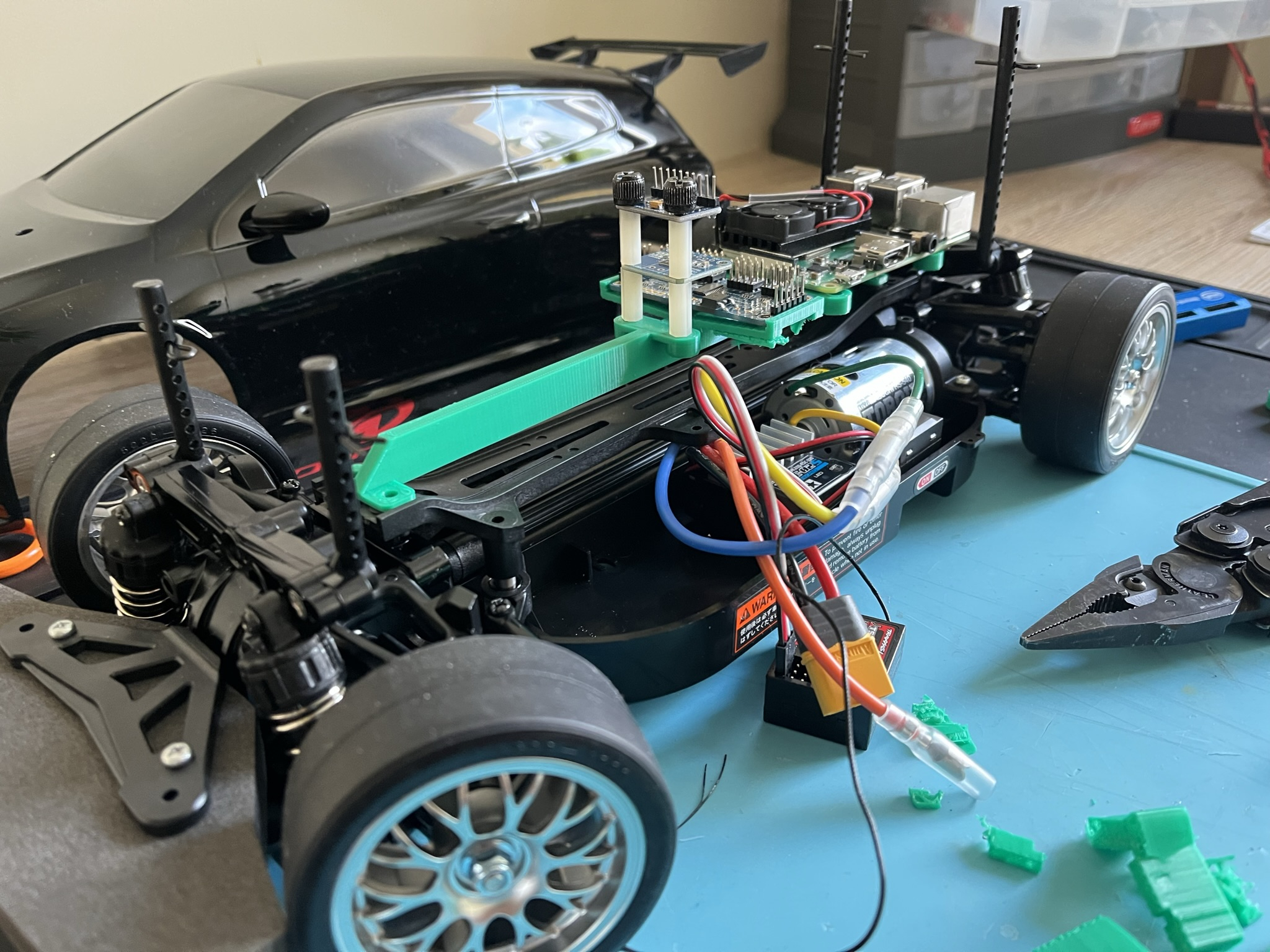
Pobierzzaprojektowałem wczoraj uchwyt do elektroniki. jest to w formie szyny, która będzie przykręcana razem z ramą. będę wprowadzał parę poprawek, muszę dodać jeszcze miejsce na przetwornice i ala przedłużacz dla I2C. można zauważyć że przód tej szyny jest pusty. to dlatego że jest to miejsce na kamerę. jest to dosłownie szyna bo zamysł jest taki by można było ustawić kamerę w jaki sposób się chcę, co mi ułatwi zadanie potem z wycięciem

źródło: comment_16546696561SdZ5UkNrw3M9fZJHFoNgh.jpg
Pobierz

@mapache: bajerancki patencik
no to ruszam ponownie z projektem #malinoweauto tylko tym razem na bogato ( ͡° ͜ʖ ͡°)
wcześniejsza wersja upadła bo dobrałem zbyt problematyczną elektronikę, jak i sama konstrukcja auta była zbyt wrażliwa, łatwo było uszkodzić
założenie takie samo jak poprzednie, ma to być auto autonomiczne, oczywiście trochę uproszczone. ale chciałbym by sam parkował, umiał ogarnąć proste skrzyżowania i tym podobne. dzieki temu że w pracy nabyłem doświadczenia z rozpoznawaniem obrazu i
wcześniejsza wersja upadła bo dobrałem zbyt problematyczną elektronikę, jak i sama konstrukcja auta była zbyt wrażliwa, łatwo było uszkodzić
założenie takie samo jak poprzednie, ma to być auto autonomiczne, oczywiście trochę uproszczone. ale chciałbym by sam parkował, umiał ogarnąć proste skrzyżowania i tym podobne. dzieki temu że w pracy nabyłem doświadczenia z rozpoznawaniem obrazu i
źródło: comment_1654512183DrFvLxrZjcNDVkP6f9DHFi.jpg
Pobierz
chcę sobie zrobić prywatny projekt w ramach nauki Pythona i mam parę pytań. Projekt to będzie auto autonomiczne na bazie RPi + Intel NCS2 + apka desktopowa. Jako tako chcę by samo auto było standalone a apka na kompa opcjonalna by mieć dane z auta itd. Będzie to niejako kontynuacja mojego #malinoweauto ale wersja już na bogato, i od zera
1. Jakie IDE polecacie?
2. Zalecane biblioteki? Głównie chodzi mi o GUI
1. Jakie IDE polecacie?
2. Zalecane biblioteki? Głównie chodzi mi o GUI


podsumuje co się ostatnio udało i co planuje.
dzisiaj skończyłem odczyt i zapis do pliku ustawień konfiguracji pada. do tego też skromne gui, nie jest jakoś wybitnie ładne ale nie od tego jestem. musiałem to zrobić dlatego że, często podczas ponownego łączenia pada do RPi to ID guzików potrafiły się zmieniać, nie są stałe. czasami są takie same jak były a czasami inne, o dziwo to nie dzieje się z przyciskami analogowymi.
zmieniłem
dzisiaj skończyłem odczyt i zapis do pliku ustawień konfiguracji pada. do tego też skromne gui, nie jest jakoś wybitnie ładne ale nie od tego jestem. musiałem to zrobić dlatego że, często podczas ponownego łączenia pada do RPi to ID guzików potrafiły się zmieniać, nie są stałe. czasami są takie same jak były a czasami inne, o dziwo to nie dzieje się z przyciskami analogowymi.
zmieniłem


@filip_k: Byłem w tym samym miejscu jakiś czas temu. Taka mała autoreklama #malinowetoczydlo
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
#malinoweauto #programowanie #tworczoscwlasna
z tego, ze raspberry pi uzyles w line followerze?( ͡° ͜ʖ ͡°)