Autor
Najnowsze
Archiwum

skończyłem oświetlenia przód jak i tył. teraz czeka mnie przylutowanie przewodów do płytki z arduino. następnie wyprowadze przewody z czujników i zrobię to samo. to będzie znacznie gorsze, i sporo więcej kabli. mimo wszystko postaram się zrobić to w miarę estetycznie i dobrze
#malinoweauto
#elektronika #majsterkowanie #arduino #diy #chwalesie #lego
#malinoweauto
#elektronika #majsterkowanie #arduino #diy #chwalesie #lego

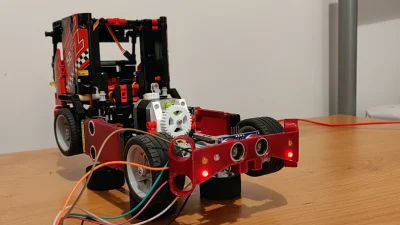
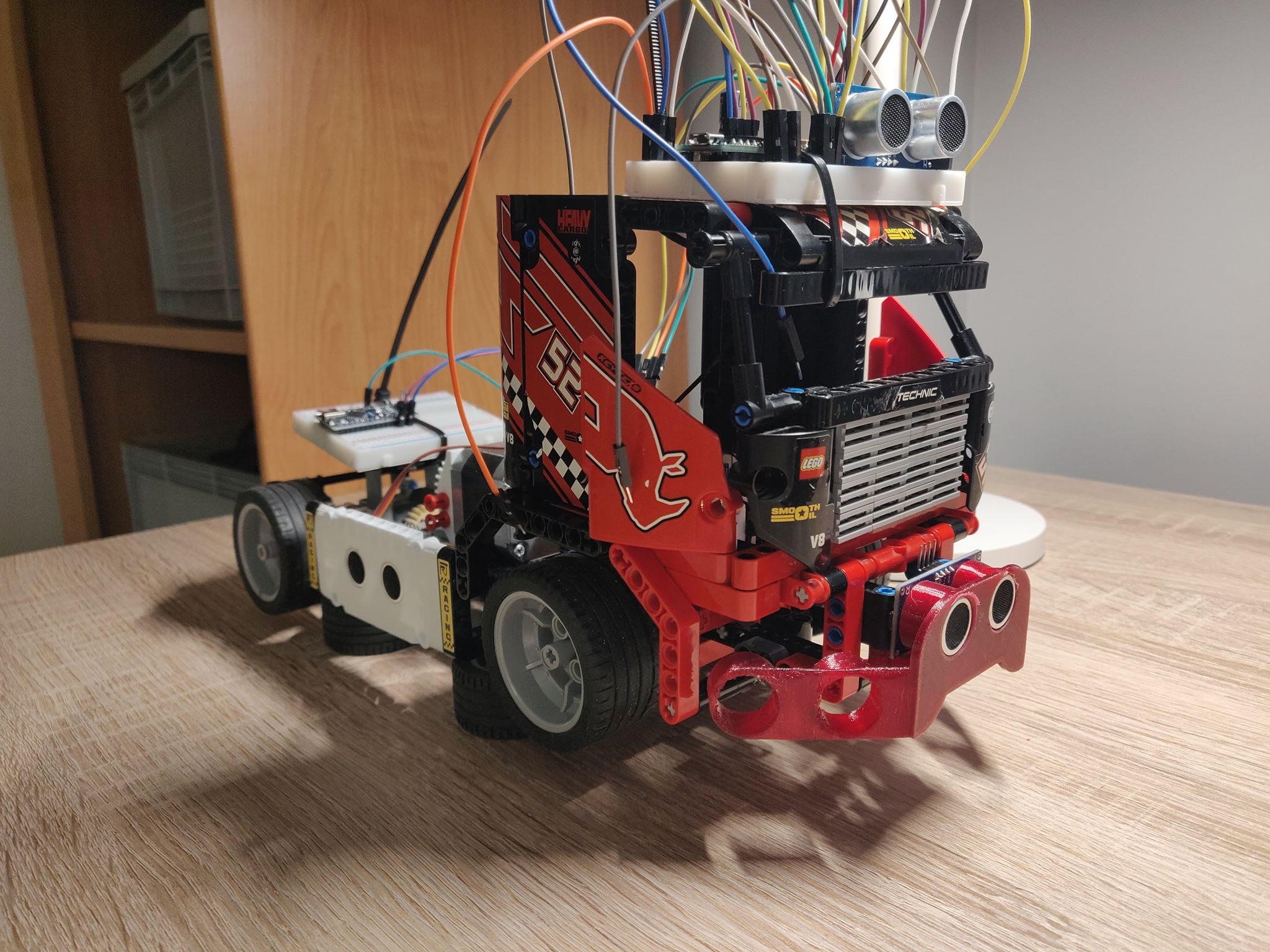
kończę powoli zderzak. zdecydowałem się na montaż świateł, coś czego nie planowałem ale takie detale jednak cieszą oko. w związku z montażem ledów muszę zmienić goldpiny na czujnikach z kątowych na pionowe by wszystko ładnie się zmieściło stąd nie są jeszcze umieszczone boczne. z przodu też jest oświetlenie, kierunki i normalne światła ale bez kabli jeszcze. planuje w weekend i następny tydzień wszystko podłączać
#malinoweauto
#druk3d #elektronika
#malinoweauto
#druk3d #elektronika

skończyłem robić tył auta. bocznych czujników nie zamontowałem jeszcze bo pierw zamontuje ledy które będą sygnalizować kierunki, hamulce i cofanie. dopiero jutro je zakupie. w komentarzu filmik pokazujący wszystkie zaprojektowane elementy. etap projektowania i drukowania raczej uważam za zamknięty i będę brał się za podłączanie wszystkiego do kupy co pewnie z tydzień mi zajmie
#malinoweauto
#druk3d #elektronika #majsterkowanie #lego #arduino
#malinoweauto
#druk3d #elektronika #majsterkowanie #lego #arduino

źródło: comment_qEUc9Y13UTigDQHIpEQc5ugO92fKsG9z.jpg
Pobierznowa wersja mocowania bocznego czujnika, względem poprzedniej wersji różni się tym że czujnik jest pionowo i po środku długości pojazdu. ustawienie pionowo czujnika ułatwi po precyzje pomiarów patrząc na to że skanuje w poziomie
#malinoweauto
#druk3d #elektronika #majsterkowanie #lego
#malinoweauto
#druk3d #elektronika #majsterkowanie #lego

źródło: comment_2pzCHKjZZ5ugdKCRuuH87oKYmTkSwlfN.jpg
Pobierz@size: bez arduino też zrobisz tylko musisz puścić to na ciągłym wątku asynchornicznym, gdzie wyniki będziesz wpisywał do jakiejś zmiennej. i wyniki odczytujesz też z tej samej zmiennej po wskaźniku

@mapache: Takiej precyzji nie mają
https://forum.arduino.cc/index.php?topic=243076.0
W Twoich warunkach to nie ma znaczenia, ale są np czułe na zabrudzenia. Stosuję taki czujnik w garażu do kontroki odległości pojazdu od ściany i czasem trzeba dmuchnąć w czujnik. Poza tym pomimo odrzutu błędów i tak uznaję go za kiepski czujnik. Kupiłem sobie laserowy VL53L0X ale nie mam czasu aby go zmienić. Będzie też pewnie miał problem z odbiciem od czarnej powierzchni
https://forum.arduino.cc/index.php?topic=243076.0
W Twoich warunkach to nie ma znaczenia, ale są np czułe na zabrudzenia. Stosuję taki czujnik w garażu do kontroki odległości pojazdu od ściany i czasem trzeba dmuchnąć w czujnik. Poza tym pomimo odrzutu błędów i tak uznaję go za kiepski czujnik. Kupiłem sobie laserowy VL53L0X ale nie mam czasu aby go zmienić. Będzie też pewnie miał problem z odbiciem od czarnej powierzchni
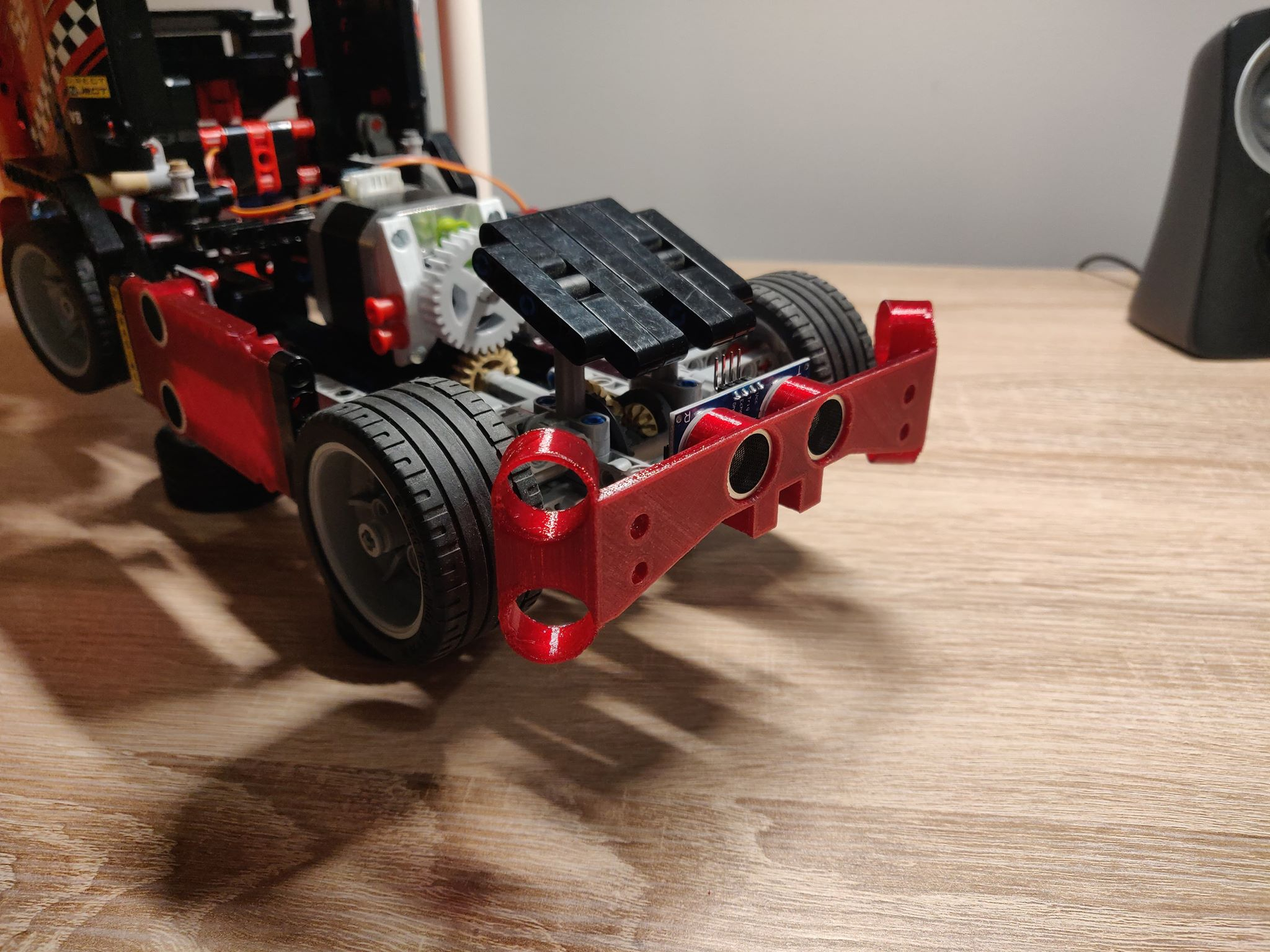
nowa wersja mocowania czujników z przodu. może i brzydsza ale praktyczniejsza. daje mi to lepsze pokrycie rogów, są praktycznie idealnie ustawione. środek jest wsunięty do tyłu z powodu że czujnik obsługuje mierzenie odległości w zakresie 2-200cm. umieszczenie w środku powoduje że zawsze będzie się mieścił w zakresie. znaczy się nie zawsze, ale jeżeli będę miał brak odpowiedzi to będzie jednoznaczne z odległością większą niż 200cm
#malinoweauto
#druk3d #
#malinoweauto
#druk3d #

źródło: comment_459hl1wA3paSU9VSYNfbtvT19tzorx6V.jpg
Pobierz@mapache: Każdy czujnik ma - to nie są precyzyjne sprzęty.
https://github.com/microflo/NewPing/blob/master/examples/NewPingExample/NewPingExample.ino
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
https://github.com/microflo/NewPing/blob/master/examples/NewPingExample/NewPingExample.ino
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
po małych walkach z drukarką zrobiłem zderzak z miejscami na czujniki. niestety drukuję właśnie drugi raz bo zapomniałem w projekcie zrobić szersze otwory na czujniki, stąd nie są wszystkie umieszczone. na zderzaku mieszczą się 3 czujniki, przód i dwa boczne pod kątem 45*. materiał to PETG, mocniejszy od PLA co przyda się w roli zderzaka. został mi tył do zrobienia. myślę też by dodać kierunkowskazy i światła, zabierze mi trochę więcej czasu
źródło: comment_SerCHSYEZhVH8XhW091U9z17vWasGoYM.jpg
Pobierz
montaż bocznego czujnika. do zaprojektowania jeszcze tył i przód
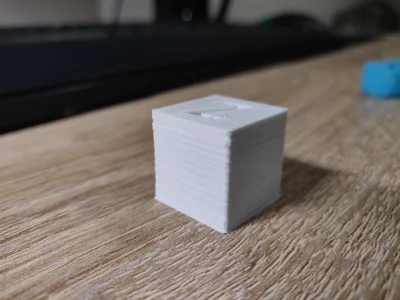
mam już chęć sprzedać drukarkę i kupić jakąś prusę. jakość wydruków mi dramatycznie spadła po wymianie ekstrudera że nie mam sił na to
#malinoweauto
#druk3d #majsterkowanie #elektronika
mam już chęć sprzedać drukarkę i kupić jakąś prusę. jakość wydruków mi dramatycznie spadła po wymianie ekstrudera że nie mam sił na to
#malinoweauto
#druk3d #majsterkowanie #elektronika
źródło: comment_sxaYnM1gYxFlxThywgbMKAfQgNibvYj9.jpg
Pobierz@skew: ja mam anycubic i3. wymienilem na direct, sporo rzeczy mam do sprawdzenia by znalezc przeczyne ( ͡° ʖ̯ ͡°)
@azamat: bardzo brzydkie ściany. wszystko brzydkie
źródło: comment_ahI70kz7jSSE1Ei0cUwQ0BWkUeaEJAY6.jpg
Pobierzjestem w trakcie robienia układu skrętnego. niestety brakuje mi jeszcze jednego mocowania serwa bo mam drukarkę wyłączoną z użytku ( ͡° ͜ʖ ͡°) dla ciekawskich mój wpis wcześniejszy na profilu. cały mechanizm działa nawet zadowalająco, nie mam uwag póki co ale wszystko wyjdzie w praniu jak złożę do kupy
#malinoweauto
#druk3d #arduino #elektronika #chwalesie #majsterkowanie
#malinoweauto
#druk3d #arduino #elektronika #chwalesie #majsterkowanie


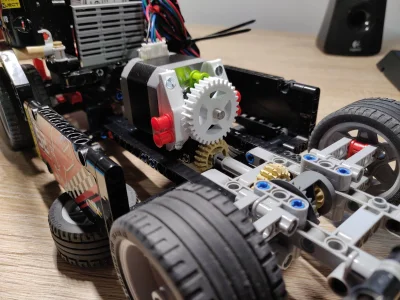
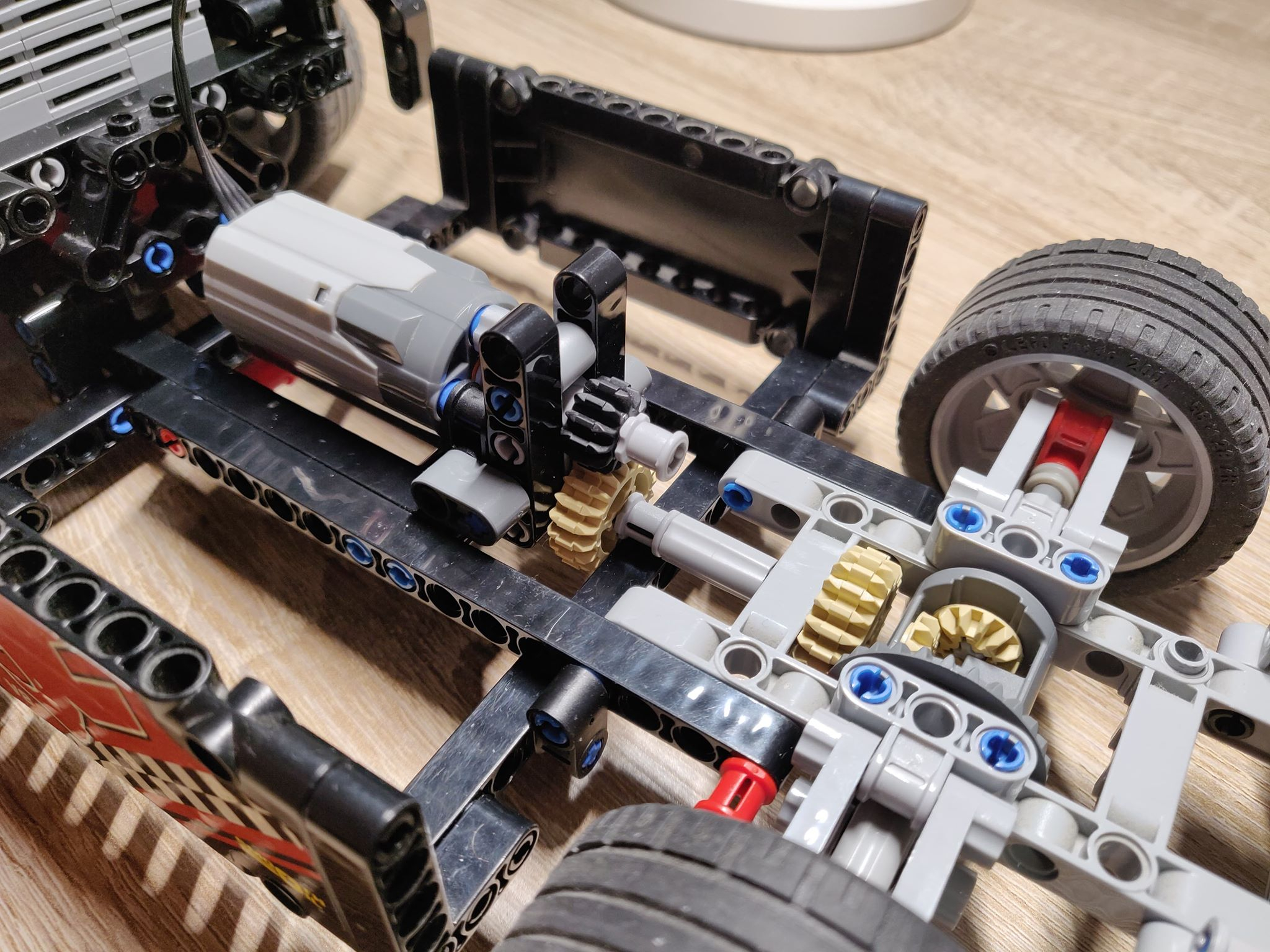
poprawiłem koło zębate, znacznie lepiej jest dopasowane, nie koziołkuje i do tego jest teraz szybciej. myślę że etap silnika jest skończony na ten moment i zajmę się projektowanie montażu do serwa by móc skręcać. picrel w komentarzu konceptu jak będzie umieszczone
tag: #malinoweauto
#druk3d #elektronika #arduino #chwalesie
tag: #malinoweauto
#druk3d #elektronika #arduino #chwalesie
źródło: comment_9Wr3hIYhHs0AlfLHCxjnK1fvvBlkFite.jpg
Pobierz

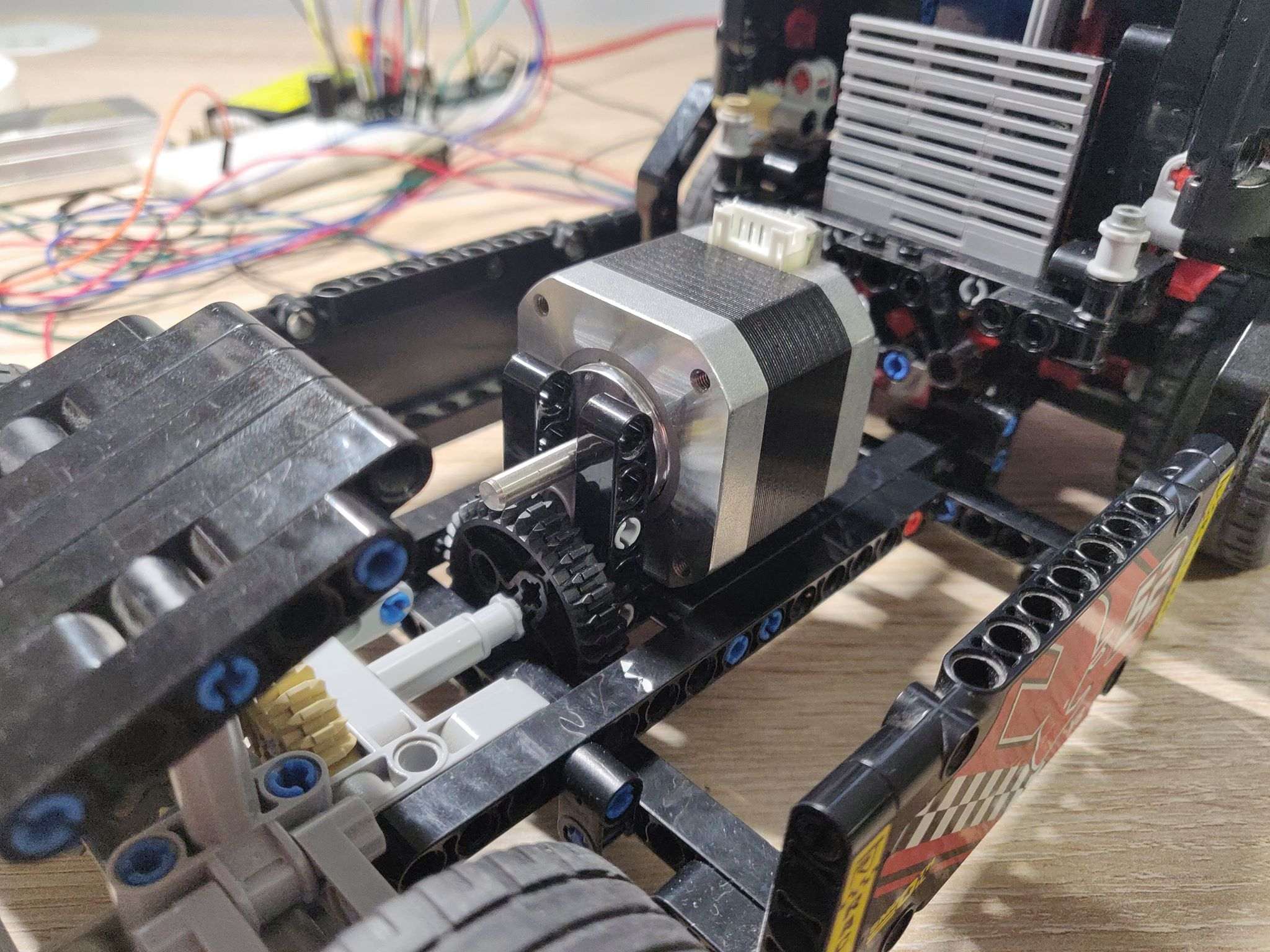
więc testuje mocowanie silnika krokowego. jak widać zębatkę źle zrobiłem i jest krzywo, błąd jest stąd że model którego użyłem w projekcie ma trochę inny wał. więc do poprawy, dodatkowo mam zamiar zmienić przełożenie. silnik krokowy jest dość silnik silnikiem więc dam na niego dużą zębatkę, a na dół małą by zwiększyć prędkość. z samych mocowań nawet jestem zadowolony, ale jakieś drobne poprawki będą. końcowa wersja będzie zrobiona z PET-G
#malinoweauto
#malinoweauto



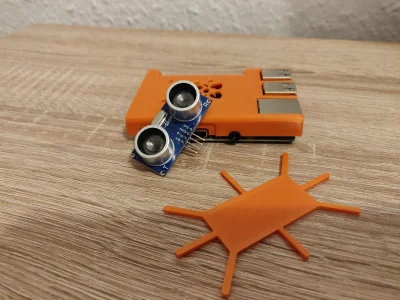
mały update jak mi idzie. projektuje mocowania czujników jak i też silnika krokowego by mieć napęd na tył. używam krokowego zamiast serwa bo został mi z drukarki, więc szkoda mi się marnował. do skręcania będzie użyte serwo. koncept mocowania czujników się trochę zmienił, z przodu będą mocowanie pionowo by zajmowały mniej miejsca i nie wystawały tak bardzo. więc to muszę zrobić i jeszcze czujniki na tył. krokowiec w porównaniu do poprzednika silnika
źródło: comment_I3R7O89s6aENruQOWgEGEkM0dcH0JFp3.jpg
Pobierz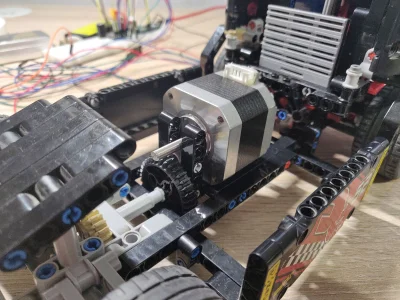
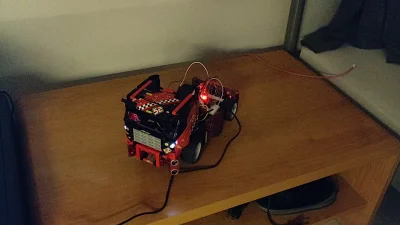
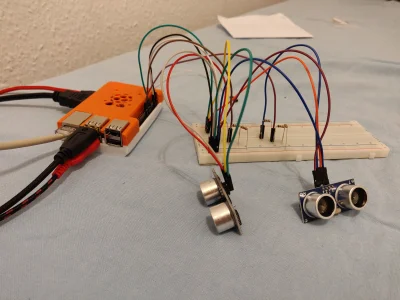
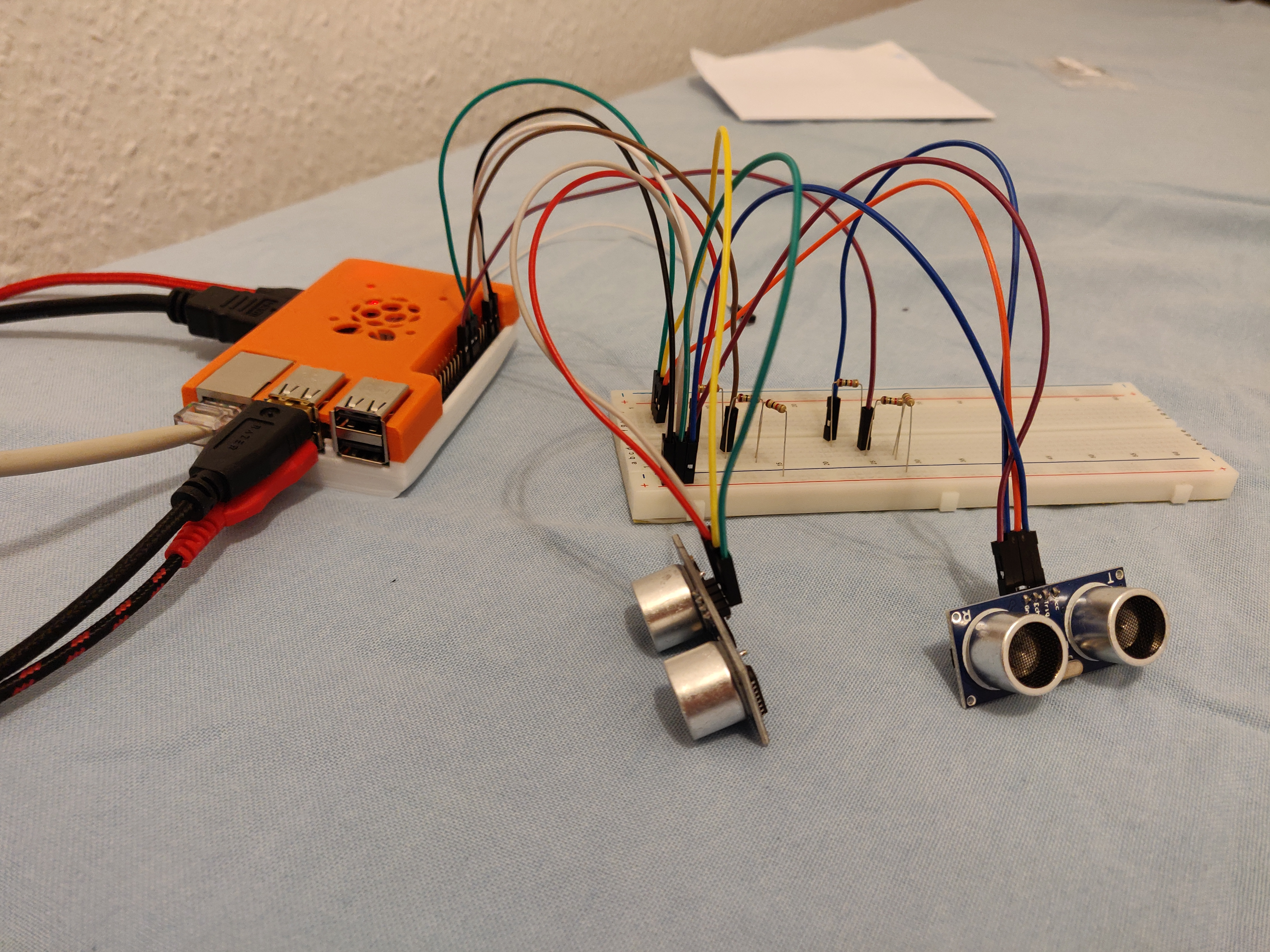
zacząłem się wstępnie bawić oczekując na częsci. właściwie to muszę je zamówić ale czekam na wypatę ( ͡° ͜ʖ ͡°) podłączyłem silnik lego do arduino. jak poskładam wszystko do kupy to zabiore się porządnie za pisanie softu. pierwsze co to bede musiał hamowanie napisać, użyje do tego PID
#malinoweauto
#arduino #chwalesie #elektronika #lego
#malinoweauto
#arduino #chwalesie #elektronika #lego


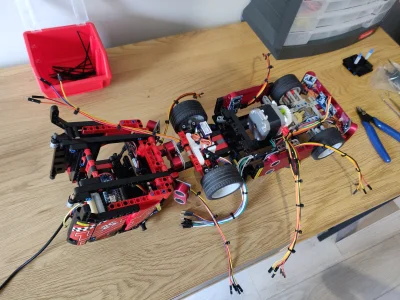
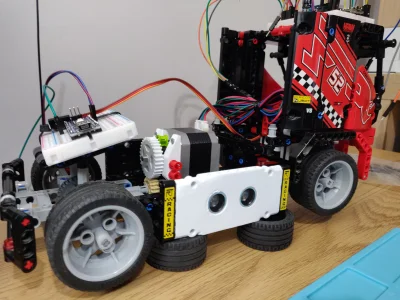
może ktoś jeszcze pamięta projekt ( ͡° ͜ʖ ͡°)
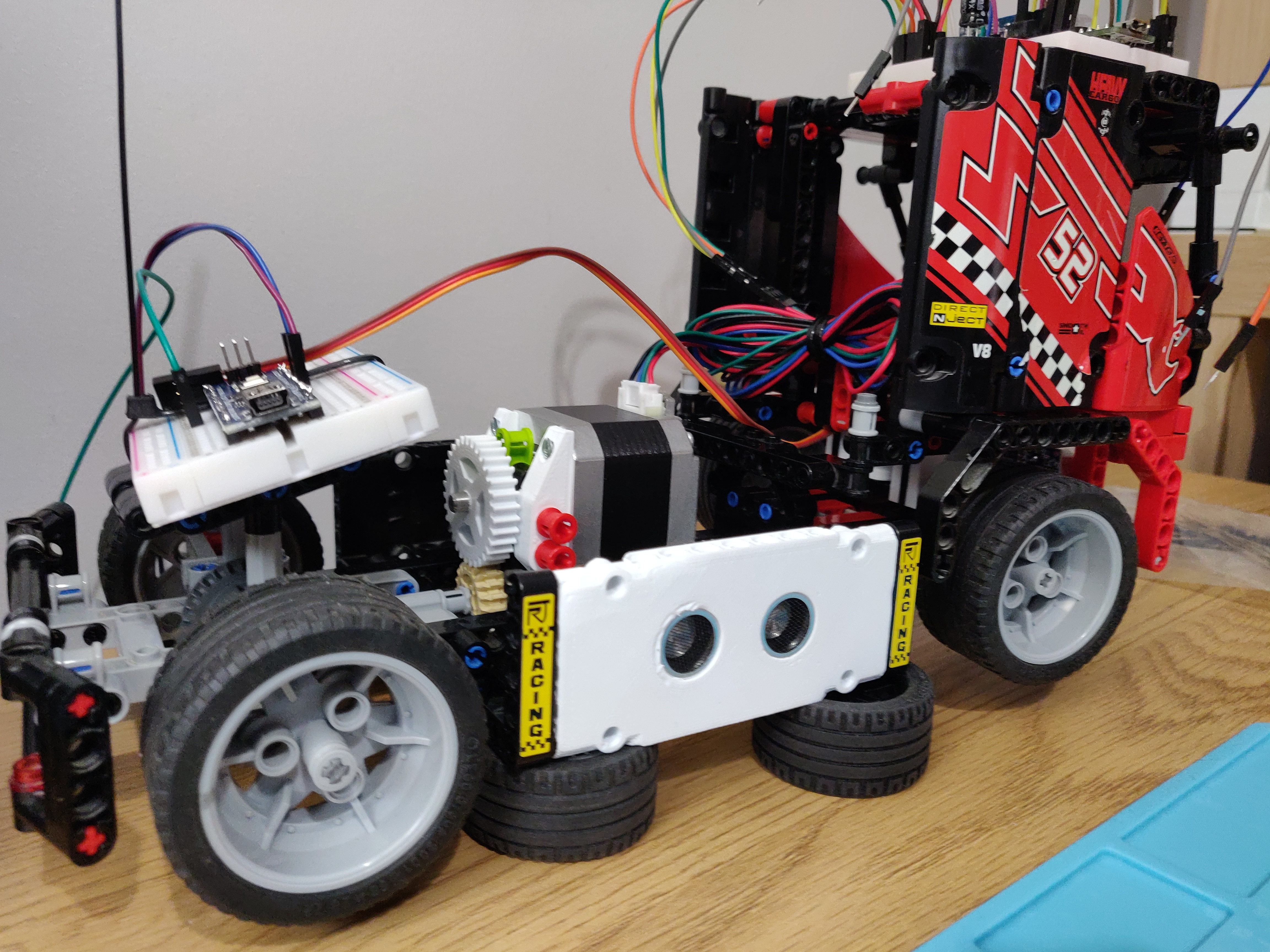
po długiej przerwie wracam do projektu, autonomicznego auta. jako bazę wybrałem ciężarówkę którą już miałem, dzisiaj skończyłem składać. wybrałem ją z powodu zderzaków, na których łatwo zamontować czujniki. do tego tył gdzie pomieszczę wszystko co zechcę. co do czujników to jeszcze przemyślę czy montować do aktualnych zderzaków czy wydrukować własne dedykowane pod czujniki. dodałem silnik elektryczny jako napęd, do
po długiej przerwie wracam do projektu, autonomicznego auta. jako bazę wybrałem ciężarówkę którą już miałem, dzisiaj skończyłem składać. wybrałem ją z powodu zderzaków, na których łatwo zamontować czujniki. do tego tył gdzie pomieszczę wszystko co zechcę. co do czujników to jeszcze przemyślę czy montować do aktualnych zderzaków czy wydrukować własne dedykowane pod czujniki. dodałem silnik elektryczny jako napęd, do

źródło: comment_zIx1T2K5FTg7mlKkHMbW8VdfvUAce6Bv.jpg
Pobierz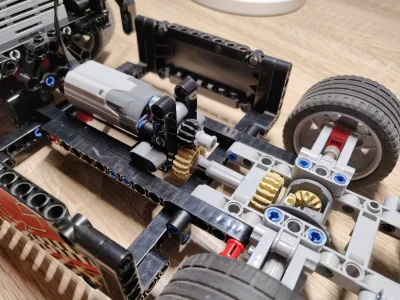

#malinoweauto
mały update i pytanie.
zabrałem się już bardziej do projektu. jesem w trakcie pisania obsługi czujników. na poczatku byłk tak że main robił wątek asynchroniczny. tam robił się trigger na czujniki, czyli wysłanie sygnału by zaczął sie pomiar. a potem kolejne wątki asynchroniczne zbierały równolegle z wszystkich czujników dane. okazało się że to za bardzo obciąża. zmieniłem na to by robiło tak by był trigger potem odpytuje jeden czujnik, trigger i
mały update i pytanie.
zabrałem się już bardziej do projektu. jesem w trakcie pisania obsługi czujników. na poczatku byłk tak że main robił wątek asynchroniczny. tam robił się trigger na czujniki, czyli wysłanie sygnału by zaczął sie pomiar. a potem kolejne wątki asynchroniczne zbierały równolegle z wszystkich czujników dane. okazało się że to za bardzo obciąża. zmieniłem na to by robiło tak by był trigger potem odpytuje jeden czujnik, trigger i
źródło: comment_trXwSdwqOsmKGsTlCx8FbPx5pf9IZ3g2.jpg
Pobierz
@mapache: nie potrzeba żadnych dodatkowych wątków, żadnej asynchroniczności. Tworzysz wektor przerwania ustawiony na CHANGE, w przerwaniu dwie maski bitowe z operatorem & i wybranym pinem:
if (maskabitowa&portipin==maskabitowa)
{
pulseEnd =
if (maskabitowa&portipin==maskabitowa)
{
pulseEnd =
@KabelZNadcisnieniem: niestety na tym nie piszę, więc nie wiem. Jeśli to architektura ARMv8, to powinny być.
tag -> #malinoweauto
Mieliśmy parę rozmów na temat projektu. Rezygnujemy jednak z Bluetooth i będziemy robić komunikacje po WiFi. Zapewni nam to większą szybkość co pozwoli w przyszłości transmitowac obraz z kamery na potrzebę testów. Póki co ciągle ustalamy jakie obiekty będą, funkcje itd.
Zmieniliśmy trochę podejścieni zaczniemy od pisania opoogramowania do czujników by zbierać z nich dane. Zaczynamy od tego bo wiedząc gdzie te dane będą umieszczone w pamięci, będziemy mogli
Mieliśmy parę rozmów na temat projektu. Rezygnujemy jednak z Bluetooth i będziemy robić komunikacje po WiFi. Zapewni nam to większą szybkość co pozwoli w przyszłości transmitowac obraz z kamery na potrzebę testów. Póki co ciągle ustalamy jakie obiekty będą, funkcje itd.
Zmieniliśmy trochę podejścieni zaczniemy od pisania opoogramowania do czujników by zbierać z nich dane. Zaczynamy od tego bo wiedząc gdzie te dane będą umieszczone w pamięci, będziemy mogli
źródło: comment_YDkvBDrAZteA9fs4zAuqgwkLlndlCgM0.jpg
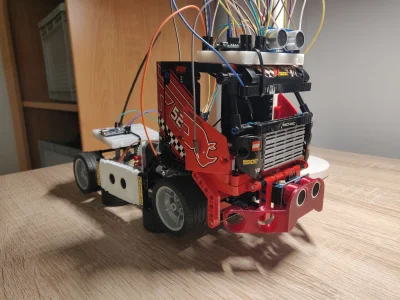
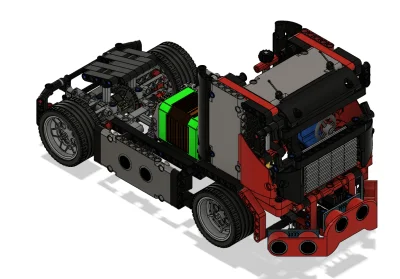
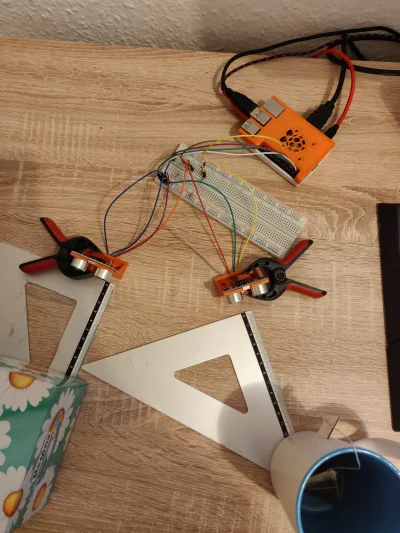
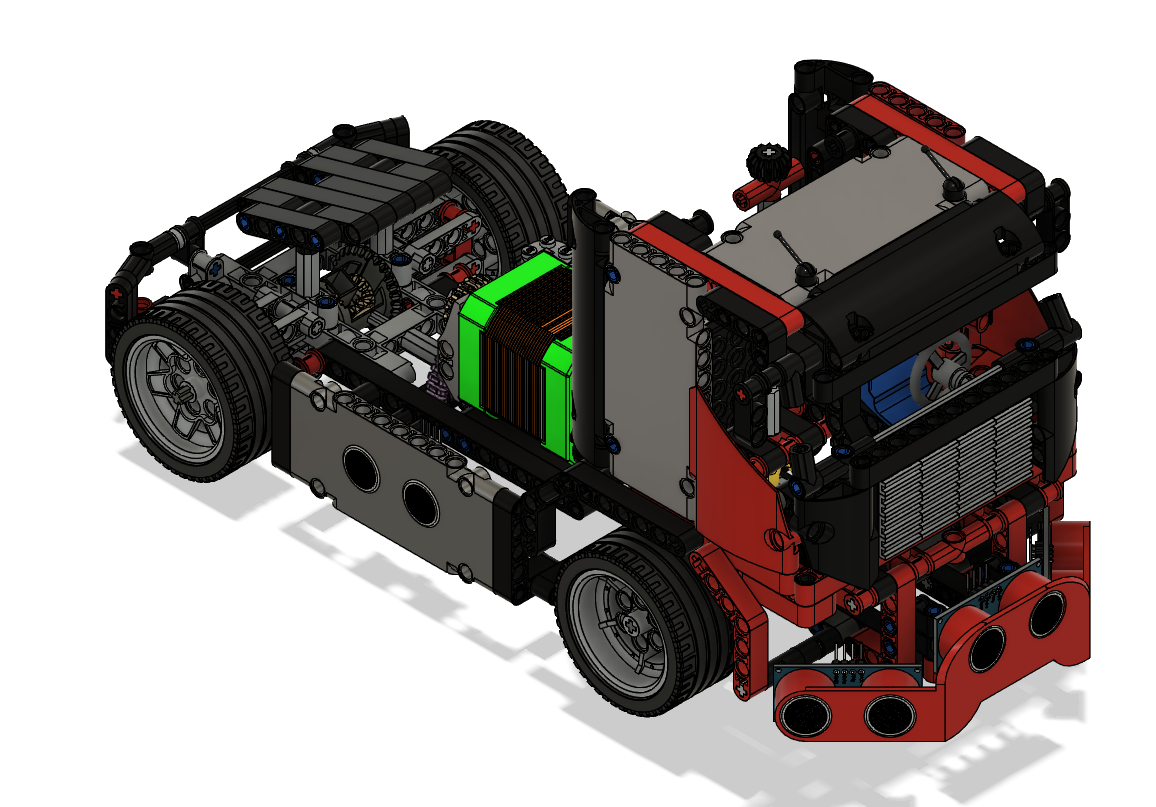
PobierzSamochód będzie wyposażony w czujniki ultradźwiękowe. Wiem że trochę biednie i się tym mocno ograniczę, ale też nie chcę wielkich nakładów finansowych w to wkładać, najchętniej bym wziął jakiegoś LIDAR 360. Ich rozmieszczenie widać na zdjęciu. By się przekonać jak będą łapać wszystko to jeździłem sobię modelem po biurko i robiłem różne scenariusze i sprawdzałem czy wyłapią to co powinny. Myślałem nad tym by czujniki sie obracaly by mieć większe pole widzenia,
źródło: comment_5bv6ELUapVk26HimODqxpfTgel1tv1YC.jpg
Pobierz
@mapache: Od siebie mogę polecić US-100, od HC-SR04 (którego chyba używasz) różni się tym że jest dodatkowo komunikacja przez UART (czyli zliczaniem czasu otrzymania odbitej fali i jej zamianą na centymetry zajmuje się mikrokontroler na czujniku) oraz jest wyposażony w termometr, dzięki czemu przy pomiarach z odległością 100cm miałem mniej niż 1cm błędu, podczas gdy przy HC-SR04 już przy 50cm jest +/- 8cm błędu

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@mapache: nowy w robotyce, co?
Nie baw się w pisanie wszystkiego samemu, strata czasu, a i tak nie zrobisz tego dobrze. Zainteresuj się frameworkiem o nazwie ROS, będziesz miał dużo rzeczy z głowy (np. wizualizacje danych z LiDARa 360 w RViZ czy pakiety do obsługi najpopularniejszego hardware). Oczywiście wszystko pisane w Cpp.
Nie baw się w pisanie wszystkiego samemu, strata czasu, a i tak nie zrobisz tego dobrze. Zainteresuj się frameworkiem o nazwie ROS, będziesz miał dużo rzeczy z głowy (np. wizualizacje danych z LiDARa 360 w RViZ czy pakiety do obsługi najpopularniejszego hardware). Oczywiście wszystko pisane w Cpp.
mirki zaczynam przygodę z Raspberry Pi (ʘ‿ʘ)
Chcę zbudować autonomiczny pojazd, zdolny do poruszania się po jezdni, rozpoznawania znaków czy też parkowania. wycisnę ilę się da z tego. na początek zamówiłem podstawowe części bo póki co jest do napisania komunikacja przez Bluetooth. Z zawodu jestem programistą więc liczę na to że będzie to przyjemny projekt. Będę używać Pythona i C++. Prototyp będzie z lego, potem druk 3D. Oczywiście
Chcę zbudować autonomiczny pojazd, zdolny do poruszania się po jezdni, rozpoznawania znaków czy też parkowania. wycisnę ilę się da z tego. na początek zamówiłem podstawowe części bo póki co jest do napisania komunikacja przez Bluetooth. Z zawodu jestem programistą więc liczę na to że będzie to przyjemny projekt. Będę używać Pythona i C++. Prototyp będzie z lego, potem druk 3D. Oczywiście

źródło: comment_odZ25Ax7zbVyZvHFCFXlgerwE6kjuBsW.jpg
Pobierz{kind=link}
@Michalius: Arduino to 8bit który ma małą moc, na raspberry da się wiecej obliczeń zrobić i np opencv do analizu obrazu odpalić i wspiera pythona - arduino fajne jest do mniejszych projektów i w przypadku kiedy nie trzeba bardzo dużej mocy obliczeniowej i ma być stabilnie
- 8x czujnik HC-SR04. Odczyty z nich są zbieranie przez osobnego klona Arduino i one są wysyłane do RPi. Czemu takie rozwiązanie? Stąd że odczyty nie są takie szybkie, są zależnie od tego jak daleko jest przeszkoda. To mogłoby dać mi opóźnienia, owszem mógłbym to zrobić na RPi i rzucić wątek asynchroniczny i nie ma problemu.
źródło: comment_WM3Vsif8pttXzsS9AwyBYePn2yipcnlp.jpg
Pobierz@mapache: Do obsługi czujników użyj timerów i przerwań, zmieścisz się w mocy obliczeniowej spokojnie. Np. ustaw wyzwalanie przerwania kiedy na pinie bedzie zmiana stanu, a w funkcji obsługi przerwania tylko będziesz przełączał flagę pomiaru czasu odpowiedzi czujnika z 0 na 1. Obok wstawisz przerwanie timera które będzie wyzwalane co x czasu, a