
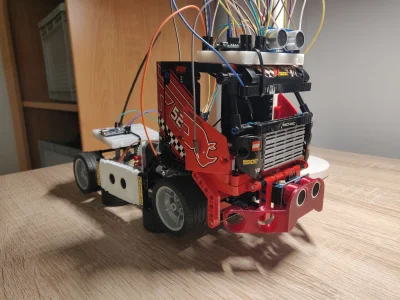
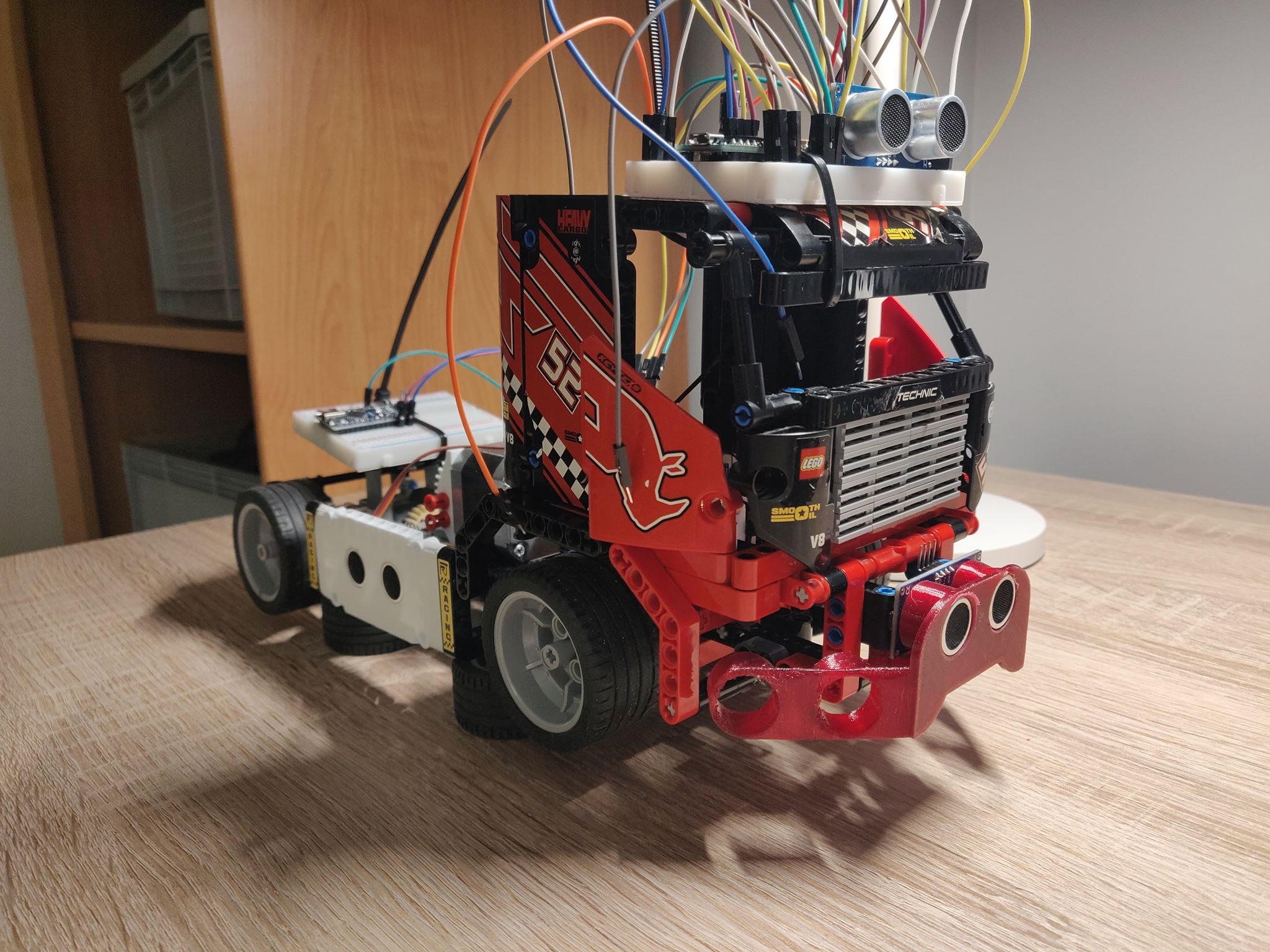
po małych walkach z drukarką zrobiłem zderzak z miejscami na czujniki. niestety drukuję właśnie drugi raz bo zapomniałem w projekcie zrobić szersze otwory na czujniki, stąd nie są wszystkie umieszczone. na zderzaku mieszczą się 3 czujniki, przód i dwa boczne pod kątem 45*. materiał to PETG, mocniejszy od PLA co przyda się w roli zderzaka. został mi tył do zrobienia. myślę też by dodać kierunkowskazy i światła, zabierze mi trochę więcej czasu


Treść przeznaczona dla osób powyżej 18 roku życia...
Treść przeznaczona dla osób powyżej 18 roku życia...
@OstatniZnak: bzdura

Treść przeznaczona dla osób powyżej 18 roku życia...

@NukeOps: w dodatku nie zbierali dowodów w sprawie, nie robili żadnych dochodzeń, nie śledzili bandziorów do odstrzału, tylko jak ktoś na kogoś nagadał to szli i strzelali, żeby potem dostać na siebie skargę i samemu trafić pod sąd. Brzmi logicznie ¯\_(ツ)_/¯ Sposób rozumowania wykopów nie przestaje zaskakiwać.
URF to najlepsze co do tej pory spotkało tą grę i nawet nie próbujcie z tym handlować. ( ͡° ͜ʖ ͡°)
#leagueoflegends
#leagueoflegends

źródło: comment_N89r9Br8jZ1J8uLbtqRmipFxMPpvQQXn.jpg
Pobierz@XDwGlowie: Najlepsze co spotkało tą grę to to że nie ma żadnej konkurencji
@damian-twoj-stary: No to niefajnie z Twojej strony. Ja bym cię zreportował na bank, nawet gdybyś kerował (⌐ ͡■ ͜ʖ ͡■)
konto usunięte via Android
Co roku z moim Starym kupujemy kostkę rosołową, wrzucamy ją do torebki na prezent i rozdajemy dzieciom chodzącym po domach na Halloween
#antynatalizm #halloween #couplegoals
#antynatalizm #halloween #couplegoals

źródło: comment_AoyhkOy13fjqXwZD0dG8FARsNUq6isoO.jpg
Pobierz
@send_nudles w życiu nie widziałem, żeby dzieci chodziły w Halloween od domu do domu :)


Siema nocna ( ͡° ͜ʖ ͡°)
źródło: comment_IRiFxsaWfzKrPNemYmXHs69Qwii9d2ci.jpg
Pobierz

Treść przeznaczona dla osób powyżej 18 roku życia...







@snickers111a nie lubię i nie jem chleba. Dziękuję za uwagę.
konto usunięte via Android
@snickers111a why not both?

@Szkalownik: weź to taguj (jego) bo historia ;)

Smacznego Mireczki.
#polskiedomy
#polskiedomy
źródło: comment_CFHheuYjJyTAbZs0dO7u1Pk9M5IKudJW.jpg
Pobierz
@Orzech1878 który to twoj stary bo widze ze lte+ zawitalo do twojego domu po teczowym piątki ( ͡°( ͡° ͜ʖ( ͡° ͜ʖ ͡°)ʖ ͡°) ͡°)
konto usunięte via Wykop Mobilny (Android)

@Mizumono: wykop > ten amerykanski sciek dla podludzi(reddit)

Porównywanie serwisu dla polskich przedstawicieli zacofania umysłowego, podludzi, bezbekow, przegrywow, beztalenci i frustratow do najpopularniejszego na świecie, gdzie ludzie znają się na tematach na które się wypowiadają, są kulturalni i pomocni, potrafią dużo rzeczy. Przecież to nawet jako żart nie jest śmieszne

W zwiazku z giga kacem po dwoch piwach xD i tym ze nie moge spac kazda osoba ktora zaplusuje wpis dostanie mema z mojego specjalnego folderu w komentarzu.


Treść przeznaczona dla osób powyżej 18 roku życia...

@Ewidentnybrakalkoholuwekrwi chyba niepoważny jesteś z tym żebractwem

@Ewidentnybrakalkoholuwekrwi: hehe normalni pulsują hehe najebusy śpią
źródło: comment_dBvR61J4kaDSkYbkTfW5KHUIXNFdxg0e.jpg
Pobierz


@whatsup666 ale taguj #dawidsulicki

Komentarz usunięty przez autora

@pepkodziobak: Wiesz, myślałem że po pierwszym panelu będzie przypomnienie o tym jak Todd powiedział, że ES6 będzie na tym samym silniku co F76 i się koleś od razu powiesi. ¯\_(ツ)_/¯
No w każdym razie w grudniu wychodzi King of Cars do Shovel Knighta (✌ ゚ ∀ ゚)☞
No w każdym razie w grudniu wychodzi King of Cars do Shovel Knighta (✌ ゚ ∀ ゚)☞

ES6 będzie na tym samym silniku co F76 i się koleś od razu powiesi. ¯_(ツ)_/¯
@ChochlikLucek: masz na myśli, ten sam silnik co morrowind (╭☞σ ͜ʖσ)╭☞

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
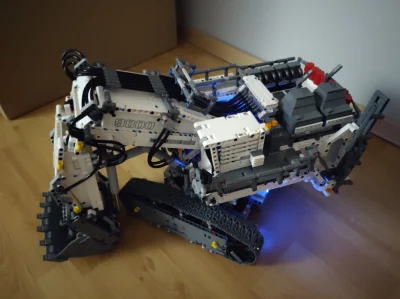
Dwa dni składania za mną. I chyba gotowe.
#lego #legotechnic #chwalesie
Wołam @SSKW @sh2dov i @Fasol88, żebyś mnie dodał do #czarnolisto ;)
#lego #legotechnic #chwalesie
Wołam @SSKW @sh2dov i @Fasol88, żebyś mnie dodał do #czarnolisto ;)
źródło: comment_VNsGsh0JsHWUuGdfZ2nQ14XGn1YRWONI.jpg
Pobierz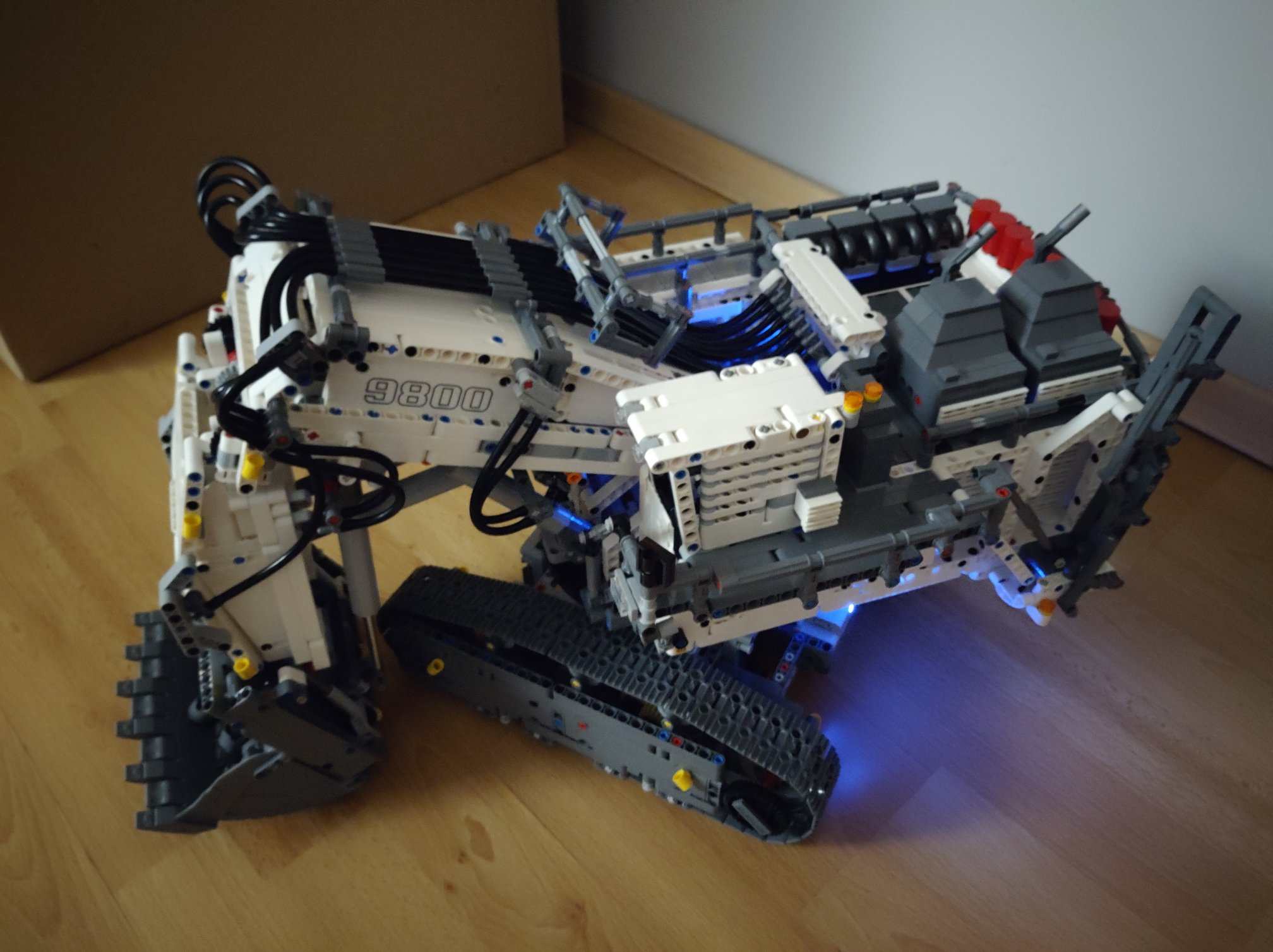{kind=link}
@Qullion: postaram się krótko.
Samych rozwiązań "inżynieryjnych" w konstrukcji spodziewałem się więcej, ale być może po zbudowaniu większości dużych maszyn z Lego, teraz już niewiele może mnie zaskoczyć. Sama konstrukcja bardzo fajna, wygląda pięknie na gotowo. Jedno co mnie boli to obudowa kabiny, mogli to jakoś ładniej wykonać, nie wiem, dać szybę z naklejką, czy coś. Samo wnętrze jest
no to opisz swoje spostrzeżenia, jak się układało? monotonnie czy ciągle coś zaskakiwało?
Samych rozwiązań "inżynieryjnych" w konstrukcji spodziewałem się więcej, ale być może po zbudowaniu większości dużych maszyn z Lego, teraz już niewiele może mnie zaskoczyć. Sama konstrukcja bardzo fajna, wygląda pięknie na gotowo. Jedno co mnie boli to obudowa kabiny, mogli to jakoś ładniej wykonać, nie wiem, dać szybę z naklejką, czy coś. Samo wnętrze jest
@Hannahalla: jestem aspołeczny i nie lubię ludzi.
#malinoweauto
#druk3d #
źródło: comment_459hl1wA3paSU9VSYNfbtvT19tzorx6V.jpg
Pobierzhttps://github.com/microflo/NewPing/blob/master/examples/NewPingExample/NewPingExample.ino
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).