Aktywne Wpisy
Siema nocna.
Właśnie siedzę przy ojcu który powoli umiera w stanie agonalnym. Zmiana warty z matką o 2:00 w nocy. Dajcie plusa na pocieszenie.
Właśnie siedzę przy ojcu który powoli umiera w stanie agonalnym. Zmiana warty z matką o 2:00 w nocy. Dajcie plusa na pocieszenie.

Lardor +65
Słucham sobie
źródło: temp_file382682799562723702
Pobierz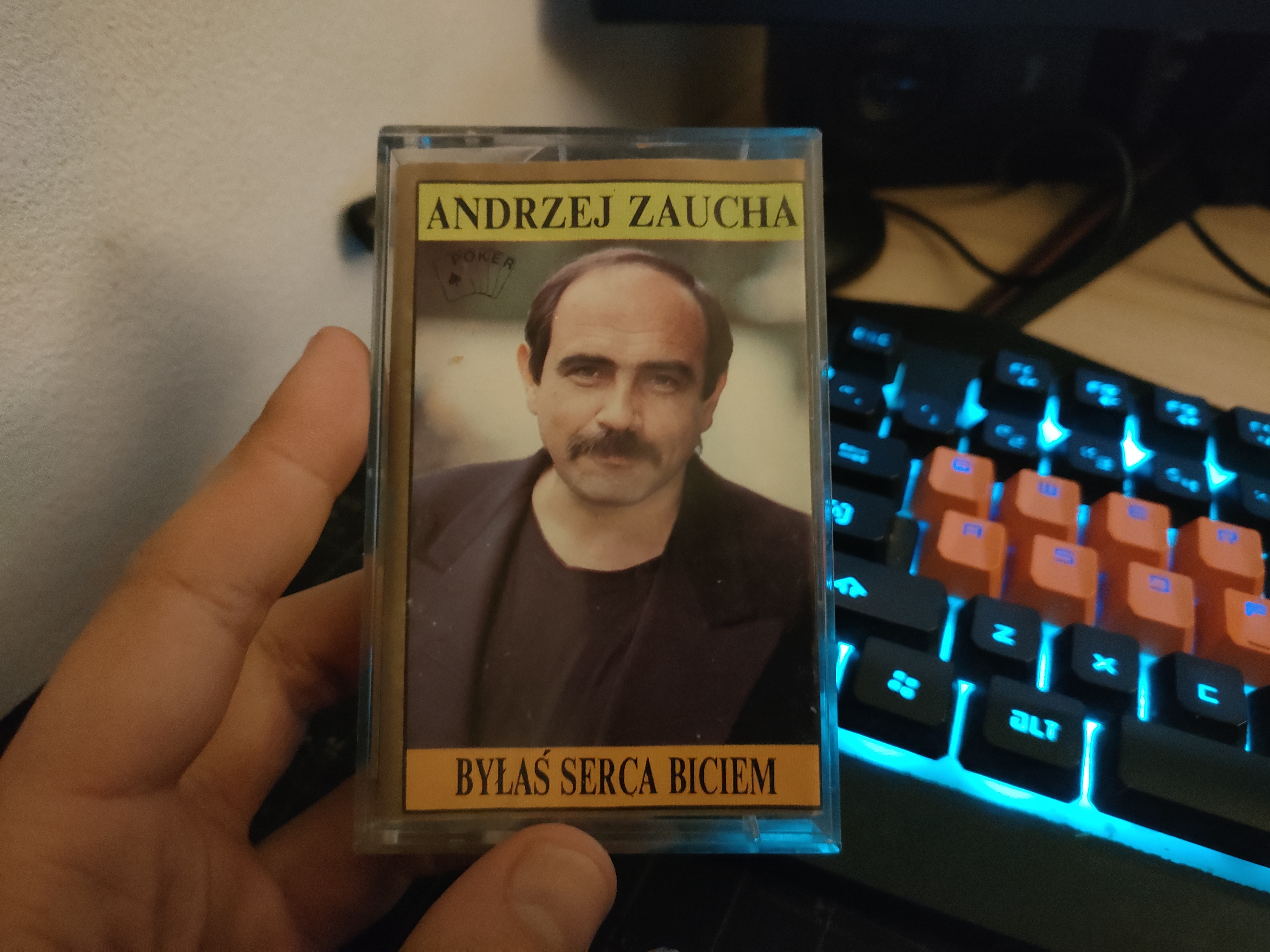{kind=link}
Aktywne Znaleziska





#malinoweauto
#druk3d #elektronika #majsterkowanie #lego #arduino #diy #chwalesie
źródło: comment_qEUc9Y13UTigDQHIpEQc5ugO92fKsG9z.jpg
Pobierzźródło: comment_EkOfPpJPTNXxierst4AOkmAptnaoYC5G.jpg
Pobierzźródło: comment_nX4LUlwOH1jE7GxBGMTfeuiF9n1jBRL3.jpg
Pobierzźródło: comment_aEFlovafcwvalLz1IegbArn3TIASGzd3.jpg
Pobierz@Polanin: Ja w zasadzie tym się najbardziej rozczarowałem przy robieniu "inteligentnego" autka z lego. Układ kierowniczy z dobrego auta rc i maksymalne kasowanie luzów.