Aktywne Wpisy
Gours +364
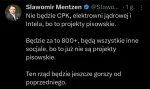
Ale propaganda ruszyła na całego z tym „nie będzie niczego” wśród środowisk PiSu i Konfederacji. Swoją drogą ciekawe, że „wolnościowcy” chcą dopłacać do inwestycji amerykańskiego korpo. A z tym „nie będzie elektowni atomowej” - serio, głupszego spinu dawno nie widziałem.
Naprawdę oczy mi się już przewracają, jak widzę tę tępą propagandę dla motłochu
#polityka #bekazpisu #konfederacja #4konserwy #neuropa #sejm
Naprawdę oczy mi się już przewracają, jak widzę tę tępą propagandę dla motłochu
#polityka #bekazpisu #konfederacja #4konserwy #neuropa #sejm

źródło: IMG_3200
Pobierz
konserwix +172





{kind=link}
{kind=link}
http://roboblog.eu/2016/06/28/arduino-dron-1/
#arduino #drony #budujedrona
Co sądzicie o tej serii? Dajcie znać jeżeli możecie ( ͡º ͜ʖ͡º)
źródło: comment_eMEaYJAAj0Ca4t9KGw5Fx8xUHGgsDUsx.jpg
Pobierz@Maciek-roboblog: No! I i na taką odpowiedź liczyłem ;)
To już hardcore, ale nie zaszkodzi zapytać :D Ja będę robił na pracę inżynierską, jeśli dotrwam, manipulator na quadropodzie.
@MajsterTS: Można by było coś takiego zrobić ( ͡° ͜ʖ ͡°) Jednak sam temat regulatorów PID dla hobbystów może być dość skomplikowany. Dlatego wybrałem Arduino ponieważ kod tam jest dość czytelny, dzięki czemu tłumaczenie będzie o wiele prostsze i bardziej przystępne.
Bardzo ciekawy projekt. Powodzenia!
Komentarz usunięty przez autora
Link do słynnego wpisu
źródło: comment_k86rTJZHrao7vMZaxVFnhAdQtvd9LfOa.jpg
PobierzOprogramowanie pokroju ArduPilota powstawało przez lata i było tworzone przez grupę kilkudziesięciu osób.
Pierwszy artykuł ciekawy, chociaż ja raczej nie jestem zainteresowany. Zajmuję się zastosowaniem dronów czyli działam na innym poziomie. Nie piszemy własnego oprogramowania, a raczej w pełni wykorzystujemy to co oferuje nam rynek.
Mimo wszystko, uważam, że omawiasz rzeczy przydatne dla wielu ludzi, powodzenia :)
Jestem jednak ciekawy jak rozwiązałeś kwestię komunikacji Arduino z radiem.