Aktywne Wpisy

WielkiNos +125
To zdjęcie przedstawia mężczyznę znajdującego się za barierką mostu w północnej części Londynu. Mężczyzna chciał popełnić samobójstwo jednak w momencie kiedy miał skoczyć zauważyli go przypadkowi przechodnie. Od razu rzucili się na pomoc człowiekowi łapiąc go za nogi, ubranie, głowę. Kilka osób przytrzymywało mężczyznę przez ponad godzinę do czasu przyjazdu pomocy. Spójrzmy na te silne uściski, determinację, współczucie i bezinteresowność ludzkiej pomocy dla całkowicie obcego człowieka.
#samobojstwo #ciekawostki #londyn
#samobojstwo #ciekawostki #londyn

źródło: temp_file4268846798483527866
Pobierz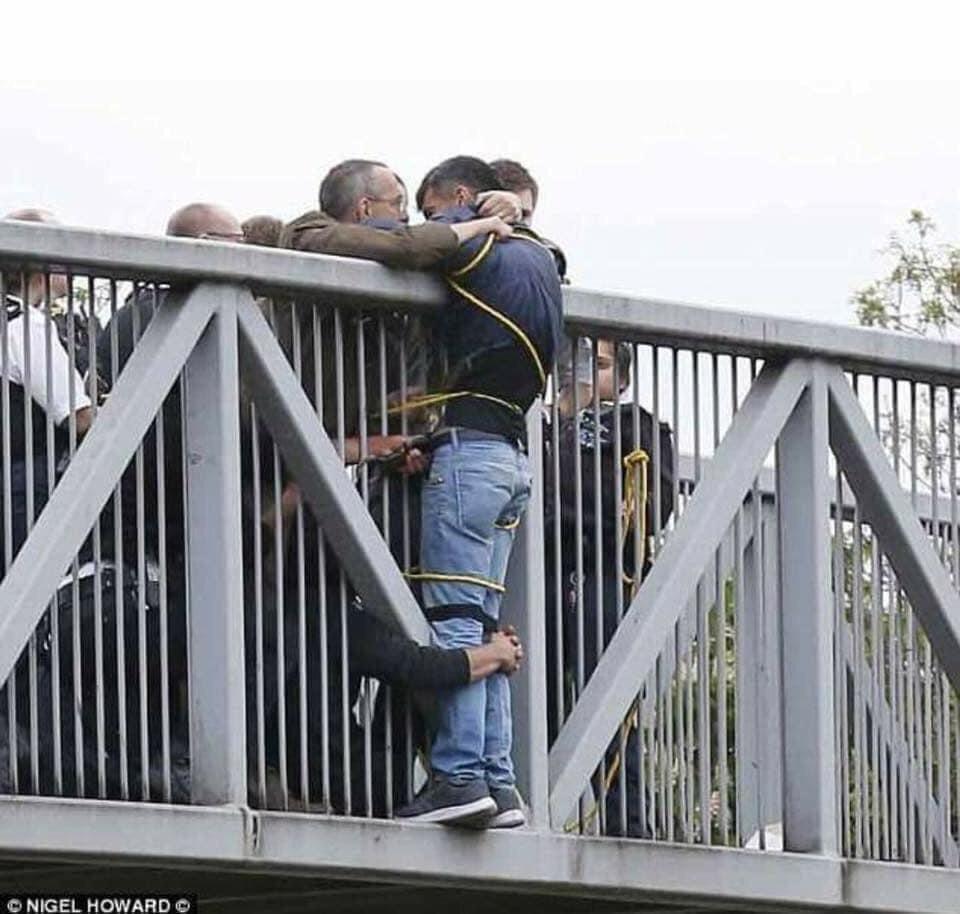{kind=link}
WielkiNos +109
Nie wiem po co lewactwo walczy o aborcję jak niedługo tak obrzydzą ludziom seks, że ci go nie będą chcieli w ogóle uprawiać. Okazuje się, że nawet założenie dla faceta bielizny erotycznej, która służy tylko do seksu, bo raczej nikt na co dzień nie chodzi w majtkach z dziurą w kroku, nie jest wyrażeniem zgody na seks. Niedługo ludzie będą podpisywać umowę na stosunek w 2 egzemplarzach po jednym dla każdej ze

źródło: temp_file3155949972271260248
Pobierz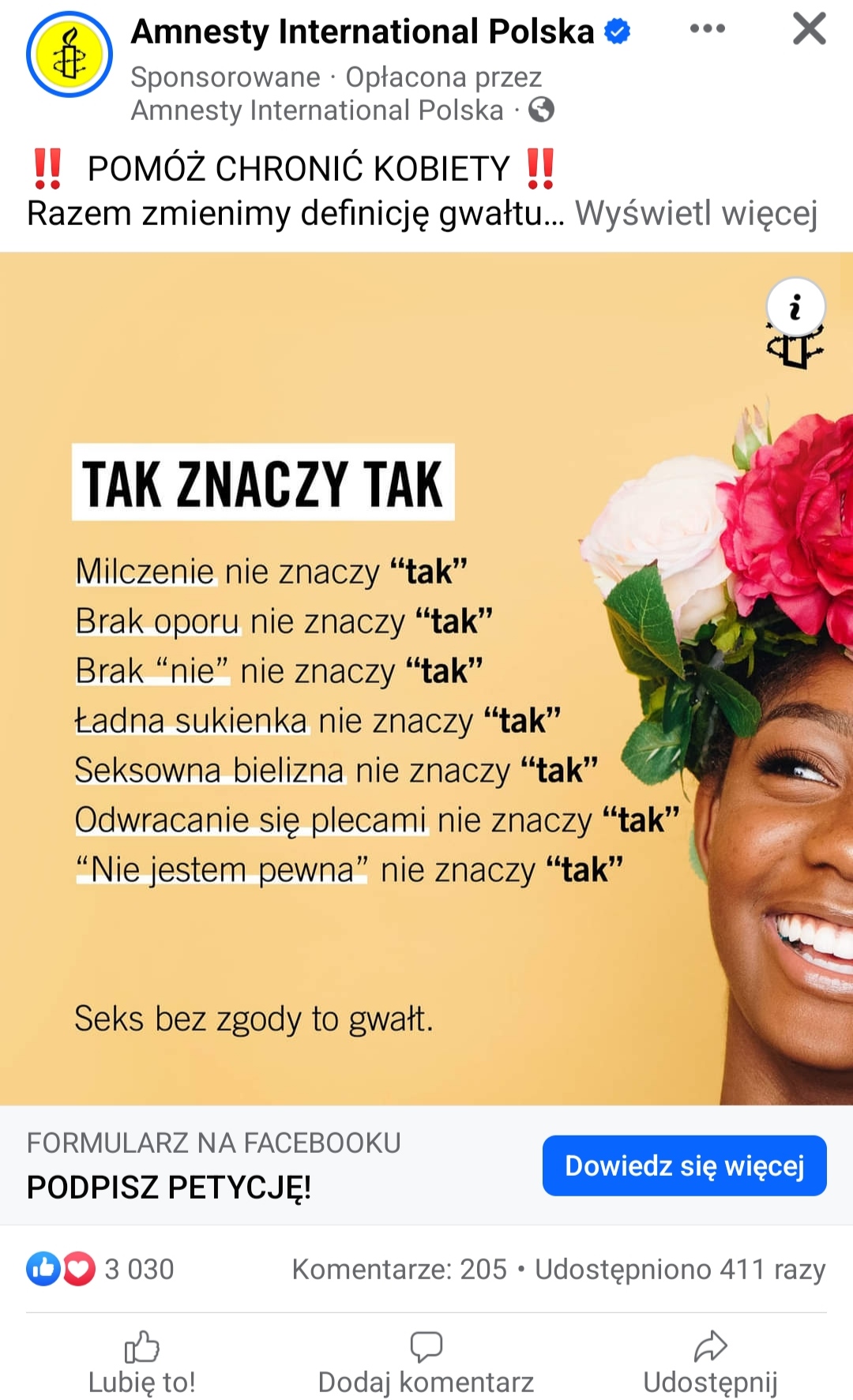{kind=link}
Aktywne Znaleziska





dodatkowe tagi: #sztucznainteligencja #ai
Przez jakiś czas będę postował coś w rodzaju monologu, takie notatki z przemyśleń odnośnie AGI - możecie ignorować, lub uczynić z tego dyskusję, nie obrażę się :) lecim:
Obecne oraz przeszłe systemy AI opierają się na jednej, lub dwóch "warstwach umysłu". Na potrzeby ułatwienia czytania zdefiniuję użyte sformułowania:
Agent - byt, który posiada sztuczną inteligencję;
Środowisko - "świat", w którym agent egzystuje i z którym wchodzi w interakcję;
Sensor - jednostka otrzymująca bodźce, dostarczane do mózgu sztucznej inteligencji (czyli sposób na poznawanie stanu środowiska);
Efektor - mechanizm powodujący zmianę w środowisku.
Dla przykładu weźmy bota w grze. Bot jest agentem, gra jest środowiskiem, mechanizm przechwytujący informacje o przeciwnikach i otoczeniu bota to sensor(y), zaś zdarzenia wysyłane do gry, symulujące klawiaturę, mysz i kontroler to motory.
Pierwsza warstwa to wiedza - agent posiada skończoną ilość informacji i wykorzystuje ją do osiągnięcia przewagi nad środowiskiem, w którym się znajduje. Przykładem jest bot do gry w szachy, opiera się on na algorytmach, które obliczają wszelkie dostępne ruchy na bazie obecnego stanu gry, decydując o tym jaki wykonać następny ruch, aby wygrać.
Druga warstwa to warstwa poznawcza - agent poza posiadanym podstawowym zestawem wiedzy potrafi go analizować i miast reagować szybko i automatycznie na podstawie posiadanej całkowitej wiedzy, jak w przypadku pierwszej warstwy, posiada proste reguły mówiące, jak analizować niepełne informacje i metodą prób i błędów usprawniać swoje reakcje na bodźce. Przykładem jest sieć neuronowa, która metodą prób i błędów uczy się jak wydajnie wykonać zadanie na podstawie informacji o środowisku oraz tym jak dobrze wykonuje swoje zadanie - krótko mówiąc: dwuwarstwowa maszyna uczy się od zera jak być najlepszym w jednym konkretnym zadaniu.
Wadą jednowarstwowego AI jest to, że jest tak podatna na błędy, jak jego twórca, innymi słowy wykona zadanie tak dobrze, jak bardzo kompletny będzie zestaw wszystkich możliwości, jakie może wykonać, aby osiągnąć cel. Zaletą jest to, że wykonuje swoje zadanie w mgnieniu oka, bez aktywnego "świadomego" decydowania o tym, co zrobi, polegając na predefiniowanych reakcjach na bodźce.
Dwuwarstwowe AI wykorzystuje mniejszy zestaw informacji, ale wymaga czasu na korekty swoich zachowań, by osiągnąć idealne wyniki, jednak po nauczeniu się zadania, wykonuje je automatycznie i szybko. Wadą jest to, że po opanowaniu wykonywania jednego zadania efektywnie, nauka następnego również wiąże się z zaczynaniem od zera, jednocześnie zapominając o tym jak wykonywać poprzednie zadanie (zapisanie stanu umysłu zadania pierwszego i jego przywrócenie przy powrocie do zadania jest uznawana za osobny umysł). Jest to AI, które potrafi wykonywać perfekcyjnie tylko jedno konkretnie zdefiniowane zadanie i nic więcej.
Ludzki mózg jednak nie działa na żadnej z powyższych zasad. Ludzki mózg opiera się o trzecią warstwę (i jest efektem czwartej warstwy, ale o niej za chwilę) jaką jest umiejętność myślenia abstrakcyjnego - tworzenia konceptów na bazie zdobytych informacji i doświadczenia w wykonywaniu zadań. Jeśli pierwsza warstwa to wiedza, druga warstwa jest uczeniem się udoskonalania osiągania celu, to trzecia warstwa jest umiejętnością nauki, jak modyfikować reguły udoskonalające osiąganie celu. Jak budować koncepty, dzięki którym można rozłożyć wykonywane zadanie na części, by potem wykorzystać je do osiągnięcia następnego zadania oraz nauki brakujących konceptów. Nauka agenta, jak uczyć się wykonywać zadanie to innymi słowy adaptacja do środowiska - brakujące ogniwo obecnych AI, adaptacja do środowiska związana jest ściśle z posiadaniem ciała - trzywarstwowe AGI nie może istnieć bez ciała, które będzie wykonywać polecenia umysłu i dawać informacje zwrotne odnośnie tego, jak dobrze agent adaptuje się do środowiska (bo w skrócie stan ciała jest dokładnie tym, co pozwala ocenić umysłowi, jak dobrze zaadaptował się do środowiska).
Jeśli nadążasz za rozumieniem warstw, pewnie domyślasz się, iż czwartą warstwą jest nic innego jak ewolucja. Pełna adaptacja trójwarstwowego agenta poza korekcją połączenia z ciałem i reakcji na środowisko, osiągana jest przez modyfikacje ciała, dzięki którym agent (z jego ciałem) potrafią coraz lepiej manipulować środowiskiem tak, by zmieniać zasady adaptacji na optymalne.
Brzmi to pewnie trochę zagmatwanie, ale śpieszę z czymś znośniejszym:
Wyobraź sobie, że tworzysz robota, który potrafi modyfikować swoje części tak, by dostosowywać się do lepszego omijania niebezpiecznych przeszkód, oraz wykorzystywania ich do wtapiania się w tło. Jedna iteracja za drugą z małą randomową zmianą w architekturze robota - jeśli robot zginie, oznacza to iż dany setup jest zły i wymaga albo przywrócenia uprzednio działającej części, lub zmiany jej na kolejną randomową zmianę. Jeśli robot przetrwa, oznacza to iż zmiana jest dobra i można zostawić zmianę o ile ciało jest już idealnie dostosowane do środowiska lub próbować zmiany gdzie indziej, jeśli agent napotka kolejną przeszkodę do pokonania. Wraz ze zmianą części, agent musi nauczyć się eksperymentalnie nowej ścieżki synaps do momentu, aż umysł nauczy się perfekcyjnie korzystać ze zmiany w ciele.
Jak widać, umysł uczy się adaptacji do otoczenia, wykonywania zadania poprzez interakcje ze środowiskiem, czyli dokonuje tego samego, co ewolucja gatunku, ale w skali lokalnej agenta. Widać także, że to, jak rozwinie się umysł (a co za tym idzie, jak bardzo będzie intelignetny) zależy od tego, jak zbudowane jest ciało i jak dobrze to ciało sprawdza się w aktualnym środowisku. Konkluzja jest jedna: nie istnieje umysł bez ciała, rozwój umysłu jest ściśle powiązany z ewolucyjnym rozwojem ciała i umysł zawsze dąży do tego, by osiągnąć optymalne połączenie z ciałem, zaś ciało dąży do optymalnej adaptacji do środowiska.
Na koniec weźmy kompensację zmysłów na przykładzie wyostrzenia słuchu, węchu (smaku) i dotyku (de facto przejęciu przezeń mapowania otoczenia dokonywanego przez utracony wzrok): gdy agent traci zdolność percepcji światła, umysł zaczyna adaptować się do zmiany w ciele i funkcje mapowania otoczenia zostają przejęte przez inne zmysły. Dzieje się to głównie przez to, że dotąd głównym (a raczej "najgłośniejszym") źródłem bodźców był wzrok, a po jego stracie reszta bodźców z innych zmysłów przestaje być znacząco filtrowana i umysł uczy się jak wykorzystywać informacje ze słuchu, dotyku i węchu (smaku) w celu udoskonalenia poruszania się w przestrzeni. Umysł zawsze adaptuje się do środowiska poprzez zmiany w ciele, zaś ciało adaptuje się do środowiska bezpośrednio poprzez modyfikację swoich organów. Aby osiągnąć prawdziwie sztuczną inteligencję generalnego zastosowania, potrzeba stworzyć ciało (wirtualne, bądź realne) i pozwolić umysłowi na rearanżację synaps w celu dopasowania się do ciała, które to z kolei dalej testuje nowe ścieżki połączeń w pokonywaniu i manipulowaniu środowiskiem, dając umysłowi informację zwrotną o tym, czy zmiany te są dobre, lub nie i utrwalając ścieżki (powtarzanie) bądź usuwając je (zapominanie).
Okej, to w skrócie co zrobię: stworzę proste środowisko z informacjami do triggerowania bodźców, pożywienie, którego pozyskanie będzie warunkiem przetrwania, zdesignuję kilka podstawowych sensorów i motorów oraz na początek wyeliminuję czwartą warstwę (a raczej ja będę świadomie czwartą warstwą) i przepuszczę to przez symulację, pozwalając kilku agentom na mikroewolucję synaps w celu jak najlepszego dostosowania posiadanego ciała do pozyskania pożywienia w środowisku :D
BTW. ameryki nie odkryłem, to wszystko pokrywa teoria zwana Practopoiesis - zachęcam do sprawdzenia :)