
Cześć mireczki
Słowem wstępu jest to kolejny wpis z serii workloga o budowie robota pająka
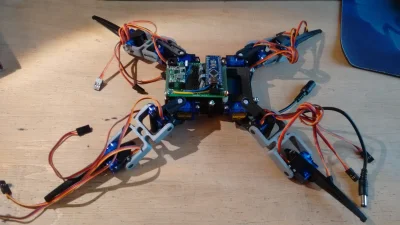
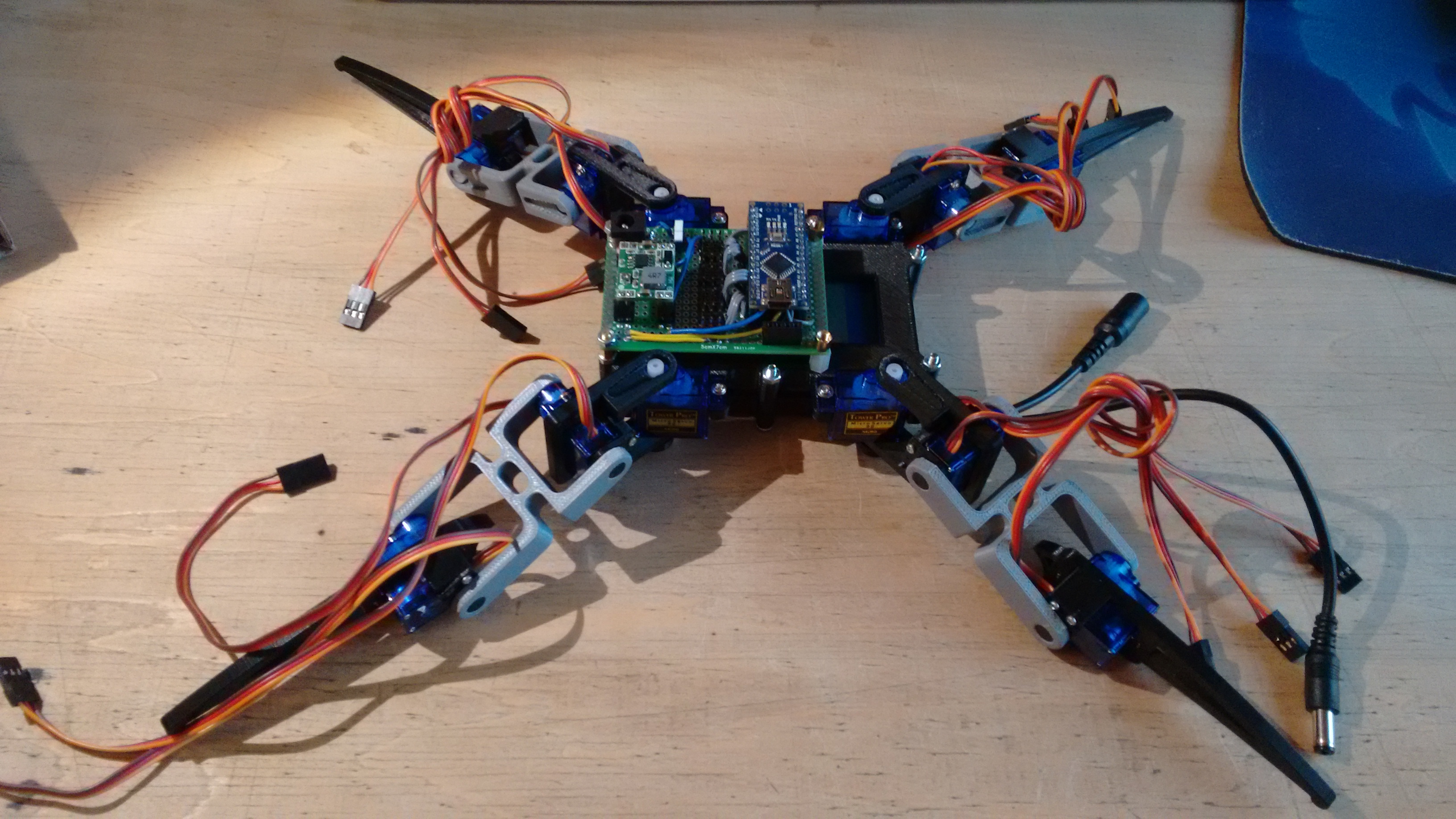
Dwa dni temu przyleciały do mnie ostatnie serwa z chin, więc zacząłem składać robota.
Zajęło to jakieś 3h, myślę, że wyszło bardzo dobrze.
Druk był na tyle dokładny, ze nie było problemu z dopasowaniem części.
Słowem wstępu jest to kolejny wpis z serii workloga o budowie robota pająka
Dwa dni temu przyleciały do mnie ostatnie serwa z chin, więc zacząłem składać robota.
Zajęło to jakieś 3h, myślę, że wyszło bardzo dobrze.
Druk był na tyle dokładny, ze nie było problemu z dopasowaniem części.
{kind=link}
{kind=link}
to znowu ja z worklogiem robota pająka ( ͡° ͜ʖ ͡°)
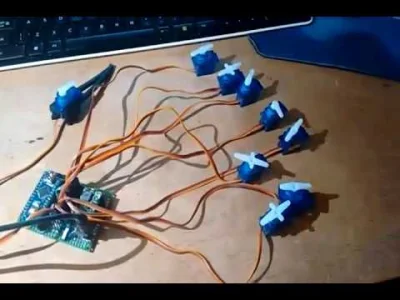
Dziś wpis krótki, zamieszczam tylko filmik z pierwszymi kroczkami tak jak obiecałem.
#arduino #pikeboty #robotyka
Taki za 4$ byłby spoko, bo tak jak piszesz wystarczy względna zmiana.
Generalnie plan mam taki, że teraz bluetooth (chwila), później dołożę te czujniki odległości, no a potem ten nacisk na nogach. Także jeszcze trochę to zajmie. W razie czego mogę zmodyfikować nogi i wydrukować nowe, tak żeby lepiej umieścić tensometry
ciekawe jak mała jest ta zmiana rezystancji - muszę o tym poczytać