Wszystko
Najnowsze
Archiwum



Cześć mireczki
Słowem wstępu jest to kolejny wpis z serii workloga o budowie robota pająka
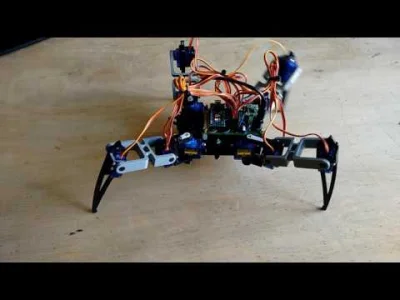
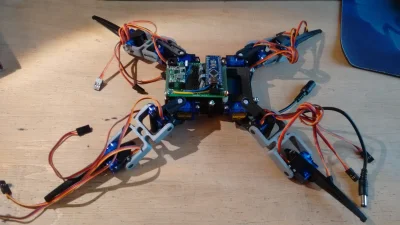
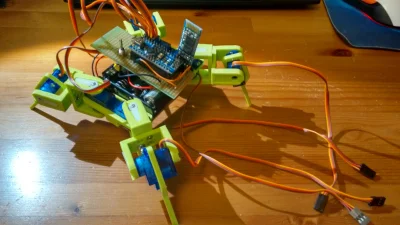
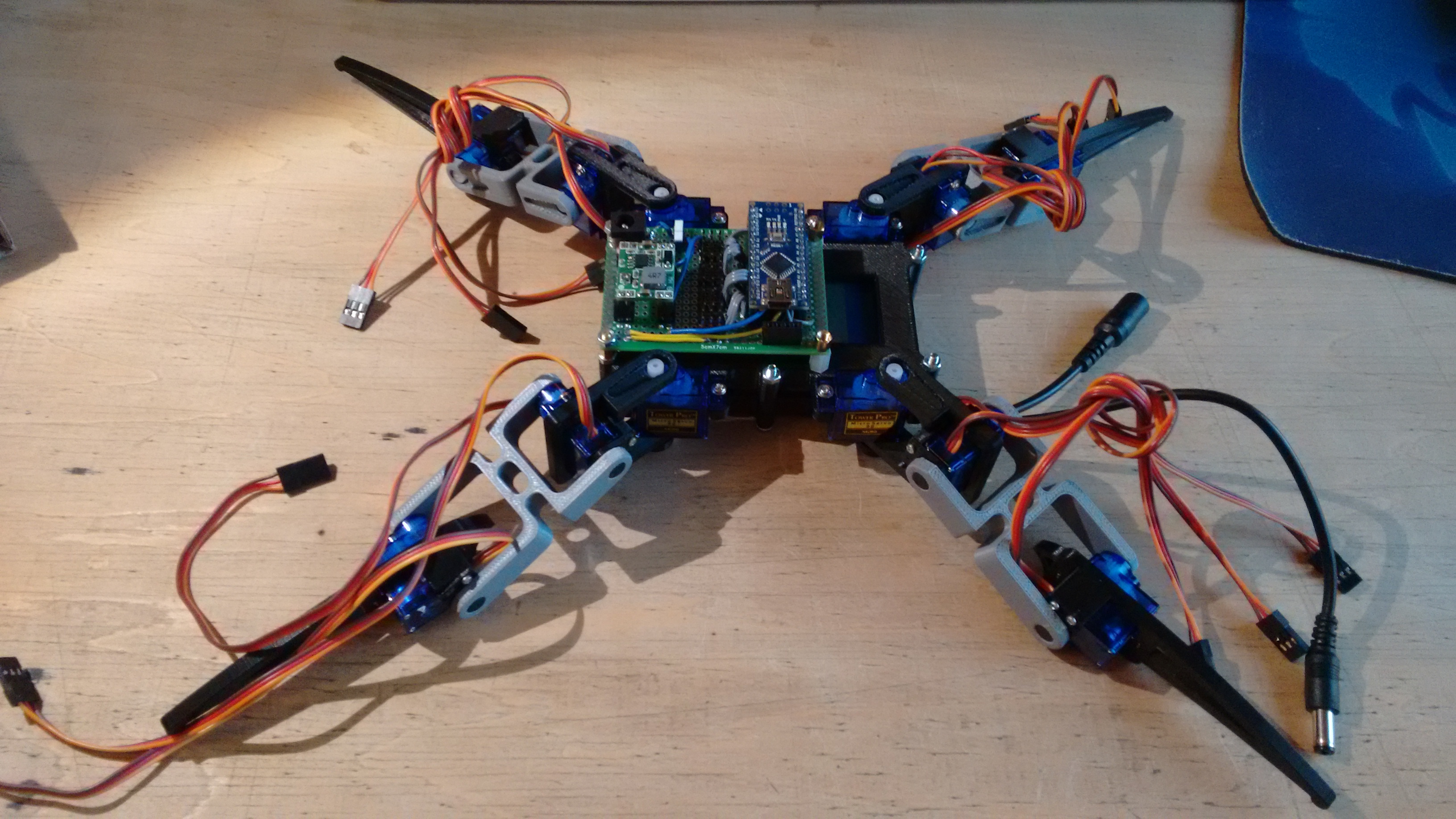
Dwa dni temu przyleciały do mnie ostatnie serwa z chin, więc zacząłem składać robota.
Zajęło to jakieś 3h, myślę, że wyszło bardzo dobrze.
Druk był na tyle dokładny, ze nie było problemu z dopasowaniem części.
Słowem wstępu jest to kolejny wpis z serii workloga o budowie robota pająka
Dwa dni temu przyleciały do mnie ostatnie serwa z chin, więc zacząłem składać robota.
Zajęło to jakieś 3h, myślę, że wyszło bardzo dobrze.
Druk był na tyle dokładny, ze nie było problemu z dopasowaniem części.
źródło: comment_mHK6a6CKKtjjJdhfZpy2gskNeaRekdQJ.jpg
Pobierz@PieceOfShit: myślę że tak, jeśli rolety są lekkie. Musiałbyś tylko przerobić serwa żeby działały w 360 stopniach ( ͡º ͜ʖ͡º)
@xerxes931: nie, projekt 3D z neta. Niestety żaden to wielki kontroler serw póki co. Każde serwo ma swój pin na arduino (╯︵╰,) ale w późniejszych wersjach będzie lepiej
Dobry wieczór mireczki
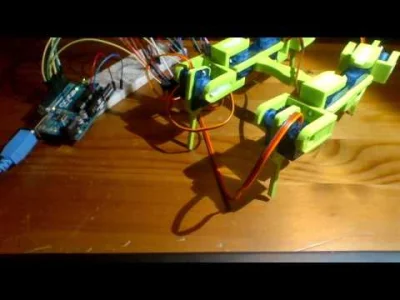
Jest to kolejny, czwarty już wpis workloga o budowie robota pająka -poprzednie wpisy tutaj: #pikeboty
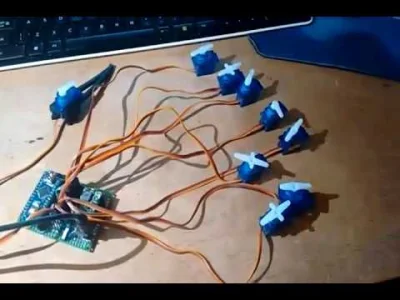
Właśnie skończyłem lutowanie płytki i teraz ją testuje. Jak widzicie na filmiku kilka serw nie działa - muszę to zaraz sprawdzić. 3 serw też brakuje, a to dlatego ze chińczyki opóźniają się z dostawą ( ͡€ ͜ʖ ͡€)
Dziś wpis krótszy bo wracam
Jest to kolejny, czwarty już wpis workloga o budowie robota pająka -poprzednie wpisy tutaj: #pikeboty
Właśnie skończyłem lutowanie płytki i teraz ją testuje. Jak widzicie na filmiku kilka serw nie działa - muszę to zaraz sprawdzić. 3 serw też brakuje, a to dlatego ze chińczyki opóźniają się z dostawą ( ͡€ ͜ʖ ͡€)
Dziś wpis krótszy bo wracam
Hej, to już trzeci wpis z workloga o budowie robota pająka. (。◕‿‿◕。)
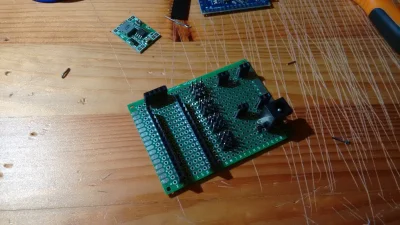
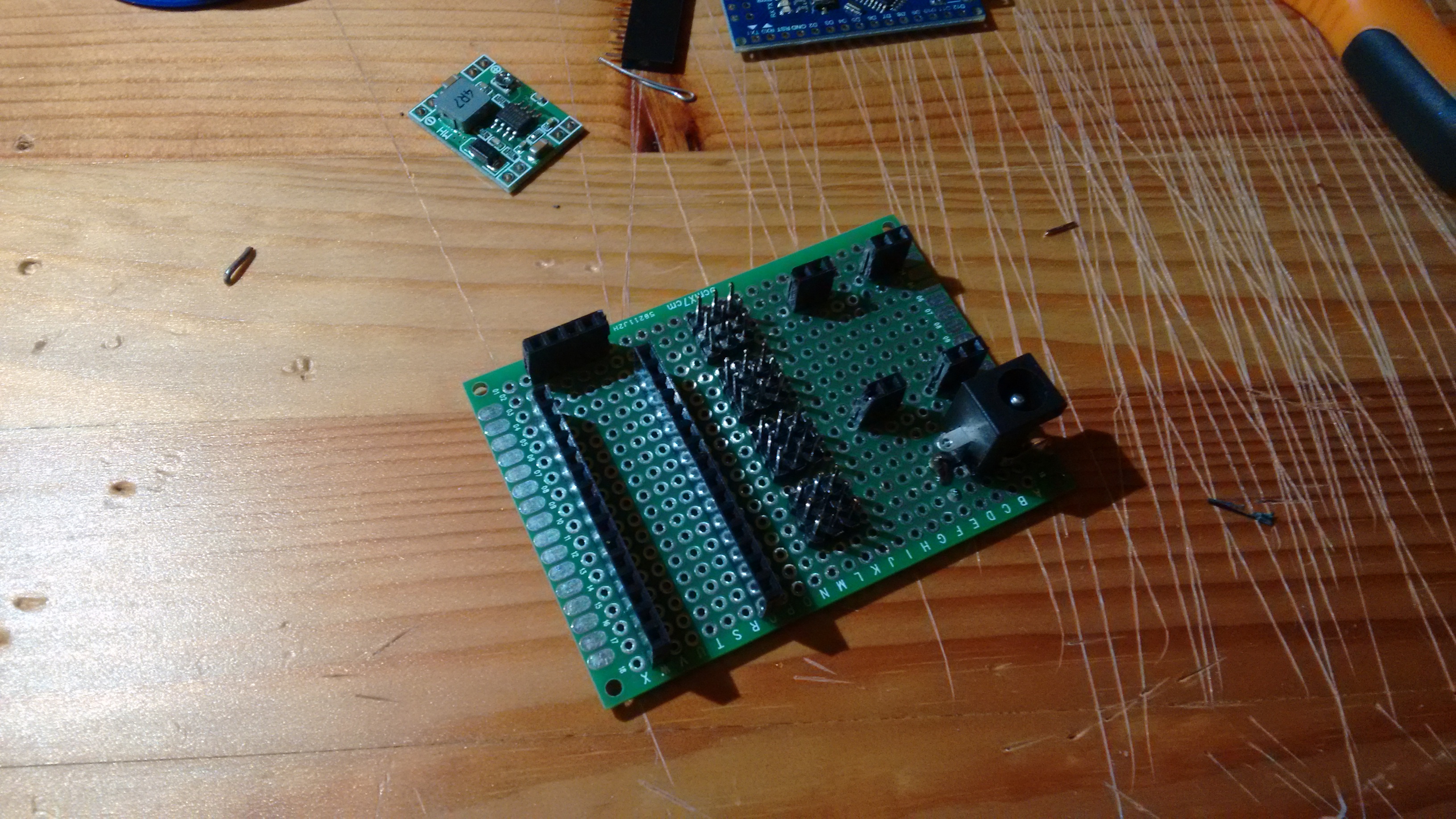
Dziś wieczorem wziąłem się za lutowanie płytki. Póki co używam płytki uniwersalnej 50x70, ale jak wszystko będzie działać, to zaprojektuję płytkę pcb w eaglu i zamówię jej wyprodukowanie.
Na płytce musi być przede wszystkim gniazdo do wpięcia akumulatora, miejsce na konwerter napięć z 12V na 5V do arduino, miejsce na samo arduino (póki co
Dziś wieczorem wziąłem się za lutowanie płytki. Póki co używam płytki uniwersalnej 50x70, ale jak wszystko będzie działać, to zaprojektuję płytkę pcb w eaglu i zamówię jej wyprodukowanie.
Na płytce musi być przede wszystkim gniazdo do wpięcia akumulatora, miejsce na konwerter napięć z 12V na 5V do arduino, miejsce na samo arduino (póki co
źródło: comment_EyNT4LPi1kcsUh3CDfr9c8F6Z9z0A2wl.jpg
Pobierz@xerxes931: Masz na myśli tego co robiłem rok temu? Druk kosztował około 50zł. Ale jak Cię interesuje cena wydruku to polecam pytać @FlameRunner , projekt miałem z neta
@radekrad: To już sporo, ale pewnie przeżyje (zależy to wszystko od typu obudowy stabilizatora, aby miał gdzie odprowadzać ciepło (na Arduino jest mały stabilizator SMD, więcej niż 100mA nie powinieneś ciągnąć, szczególnie jak masz tak duży spadek 7V)).
Najtańsze regulowane "bucki" działają bardzo dobrze.
Najtańsze regulowane "bucki" działają bardzo dobrze.
Hej,
dziś drugi wpis z workloga dotyczącego budowy robota pająka
o planach, możecie przeczytać w poprzednim poście: tutaj - pierwszy wpis
Druk 3d
Zacznijmy od tego, że cały szkielet robota został wydrukowany przez @
dziś drugi wpis z workloga dotyczącego budowy robota pająka
o planach, możecie przeczytać w poprzednim poście: tutaj - pierwszy wpis
Druk 3d
Zacznijmy od tego, że cały szkielet robota został wydrukowany przez @

źródło: comment_nedBoSbryFSww1I4l8MdowIy0CtflfkJ.jpg
PobierzCześć Mirki i Mirabelki,
minął rok, od budowy ostatniego robota pająka - czas na kolejnego.
Tym razem, będzie większy i będzie miał więcej stopni swobody w nogach.
Szkielet został wydrukowany #druk3d dzięki uprzejmości mirka: @FlameRunner
Pająkiem będzie sterować #arduino połączone bluetoothem z telefonem.
minął rok, od budowy ostatniego robota pająka - czas na kolejnego.
Tym razem, będzie większy i będzie miał więcej stopni swobody w nogach.
Szkielet został wydrukowany #druk3d dzięki uprzejmości mirka: @FlameRunner
Pająkiem będzie sterować #arduino połączone bluetoothem z telefonem.
źródło: comment_zf6gs4EMgNcE8zeoYatA5WUJLlB01a5x.jpg
Pobierz
Hej, znacie może jakąś dobrą i tanią ( ͡€ ͜ʖ ͡€) firmę zajmującą się drukiem 3d z wysyłką?
Buduje kolejnego pająka ( ͡º ͜ʖ͡º)
#pikeboty
Buduje kolejnego pająka ( ͡º ͜ʖ͡º)
#pikeboty

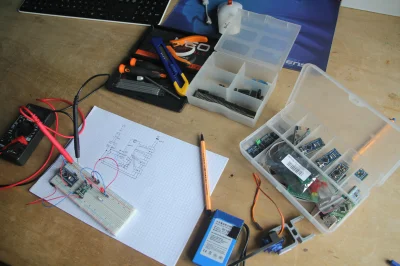
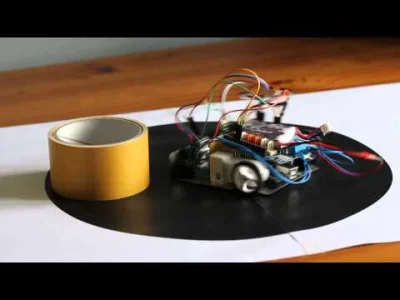
Cześć, ostatnio zająłem się budową robota klasy minisumo. Na razie oparty na arduino, ale to poprawię ;)
Jeśli chodzi o czujniki to jest wyposażony w 3 transoptory odbiciowe, oraz czujnik odległości sharp. W planach lepsza konstrukcja, więcej czujników odległości i przejście z arduino na atmege.
http://imgur.com/a/J0Mev
https://www.youtube.com/watch?v=e7FRr7MlvkY&feature=youtu.be
Jeśli chodzi o czujniki to jest wyposażony w 3 transoptory odbiciowe, oraz czujnik odległości sharp. W planach lepsza konstrukcja, więcej czujników odległości i przejście z arduino na atmege.
http://imgur.com/a/J0Mev
https://www.youtube.com/watch?v=e7FRr7MlvkY&feature=youtu.be
@Jaro070: silniczki 20 zł za sztukę, kółka 20 zł oba, montaż silników 15zł, sharp koło 30zł, transoptory 8zł, do tego arduino, ale je już miałem. Podwozie wyciąłem z pacy murarskiej za 15zł
Długo nic nie pisałem, ale już wracam do pracy. Głównie jest to zasługa @naprawalaptopow dzięki, którym dostałem potrzebne części!
Dzięki cumple ( ͡° ʖ̯ ͡°)
#pikeboty #foliababelkowaboners #tylewygrac
Dzięki cumple ( ͡° ʖ̯ ͡°)
#pikeboty #foliababelkowaboners #tylewygrac

źródło: comment_Le4uvC1JqCGU435PZgXDFBYbPu3TVQvh.jpg
Pobierzdobry wieczór mirasy, przykro mi, że dawno nic nie wrzucałem tutaj, ale niestety mam problem z zasilaniem. 4 paluszki okazały się nie wystarczające, więc jestem w trakcie szukania jakiegoś fajnego, ale co najważniejsze taniego ( ͡€ ͜ʖ ͡€) akumulatorka. Jak coś ogarnę to wrzucę gotowy filmik z chodzeniem, już przez bluetootha.
Zastanawiam się czy nie zaprojektować swojej płytki PCB do pająka, bo ta uniwersalna wygląda kiepsko. Co myślicie?
#
Zastanawiam się czy nie zaprojektować swojej płytki PCB do pająka, bo ta uniwersalna wygląda kiepsko. Co myślicie?
#

@OldPike: Wiadomo, że odpisze ( ͡° ͜ʖ ͡°) Co myślisz o tym? http://naprawalaptopow.pl/mirkoelektronika
@PrawieJakBordo: Dzięki za pamięć cumplu!
@PrawieJakBordo: Dzięki za pamięć cumplu!

źródło: comment_sTfvLHH36vMtxCXx9LUxkyznNYHaTLec.jpg
Pobierz
@OldPike: ten co mam to raczej nie jest taki ciężki, poprzedni był wielkości dwóch paluszków i dawał radę. wszystko zależy jak długo pająk ma spacerować ( ͡° ͜ʖ ͡°)
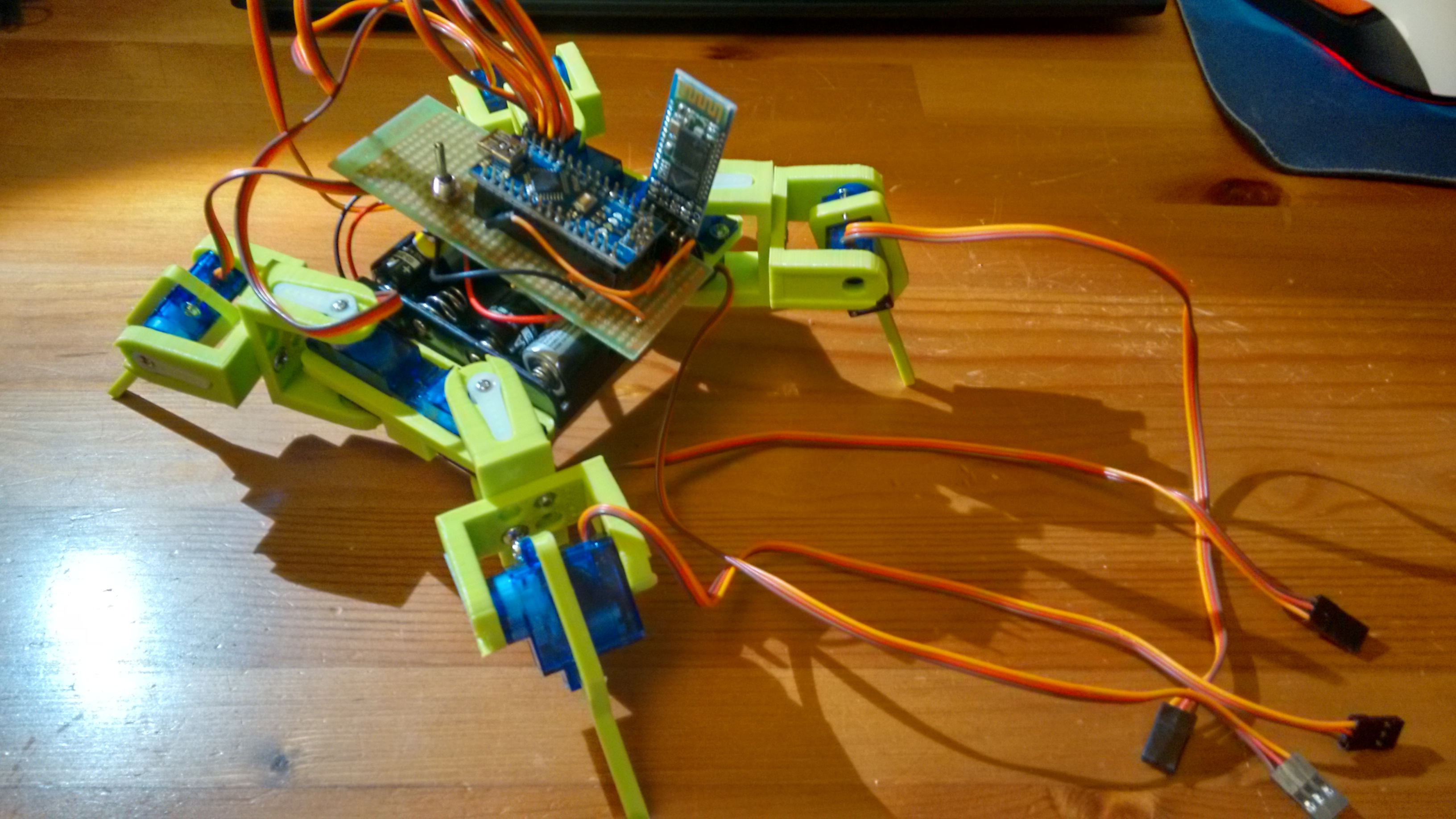
Dobry wieczór, skończyłem dziś płytkę, a na niej zamontowałem arduino nano, moduł bluetooth, zasilanie (4xAA). Na koniec planuję zrobić ładniejszą płytkę, na razie do testów jest taka. Muszę zrobić porządek z tymi kablami od serw, bo wszędzie się plączą, może je poskracam, albo zepnę czymś. Kupiłem też coś co powinno zmniejszyć ślizganie się robota na podłodze.
Jutro postaram się wrzucić filmik z działania robota na nowym mózgu ( ͡° ͜ʖ ͡°)
Jutro postaram się wrzucić filmik z działania robota na nowym mózgu ( ͡° ͜ʖ ͡°)
źródło: comment_R7KefGHe8Dwh0EtbkwXxrJWti7djrLwS.jpg
Pobierz
Pierwsze kroczki!
Robocik wreszcie chodzi do przodu, radzi sobie dosyć dobrze na większości powierzchni, jednak dodam mu chyba na końcówkach taśmę antypoślizgową, żeby wyeliminować ślizganie.
Pora zacząć przerzucić projekt na nano, bo ta plątanina kabli bardzo przeszkadza.
https://youtu.be/MYghd2Xx1_o
Wołam
Robocik wreszcie chodzi do przodu, radzi sobie dosyć dobrze na większości powierzchni, jednak dodam mu chyba na końcówkach taśmę antypoślizgową, żeby wyeliminować ślizganie.
Pora zacząć przerzucić projekt na nano, bo ta plątanina kabli bardzo przeszkadza.
https://youtu.be/MYghd2Xx1_o
Wołam


Nie mam siły pisać jeszcze dziś chodzenia, na początek musi Wam wystarczyć wstawanie ( ͡° ͜ʖ ͡°)
https://www.youtube.com/watch?v=f4hQIjOYiTA&feature=youtu.be
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @qzer @PrawieJakBordo @jasiek12321 @Benzez @spontan1 @pixelsketcher
#pikeboty - dalsza relacja pod tym tagiem, zachęcam do obserwowania
https://www.youtube.com/watch?v=f4hQIjOYiTA&feature=youtu.be
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @qzer @PrawieJakBordo @jasiek12321 @Benzez @spontan1 @pixelsketcher
#pikeboty - dalsza relacja pod tym tagiem, zachęcam do obserwowania
he ded, ja bede robil na galileo, narazie mam 4 serwa ale wieksze ( ͡° ͜ʖ ͡°)
Dobry wieczór mirki, śrubki kupione - zabieram się do pracy.
Złożyłem brakujące części i zamontowałem do korpusu. (na zdjęciu tylko 1 noga)
Jak się wszystko uda zakodzić, to jeszcze dziś w nocy wrzucę filmik z pierwszych kroczków ;)
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @
Złożyłem brakujące części i zamontowałem do korpusu. (na zdjęciu tylko 1 noga)
Jak się wszystko uda zakodzić, to jeszcze dziś w nocy wrzucę filmik z pierwszych kroczków ;)
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @

źródło: comment_dtx8TV9Vm0tXpYO2weyYGdgpf3a0LBmT.jpg
Pobierz
@OldPike: jak zainteresował się nim intel i dorzucił procesor to myślę, że szybko przestał się zastanawiać nad ceną ( ͡° ͜ʖ ͡°) (gugle: intel hexapod). Same 18 serw już swoje kosztuje, do tego dobra jednostka centralna etc. Co ciekawe ma w sobie czujniki i sam stwierdza jak się odpowiednio poruszać aby wykonać zadanie.
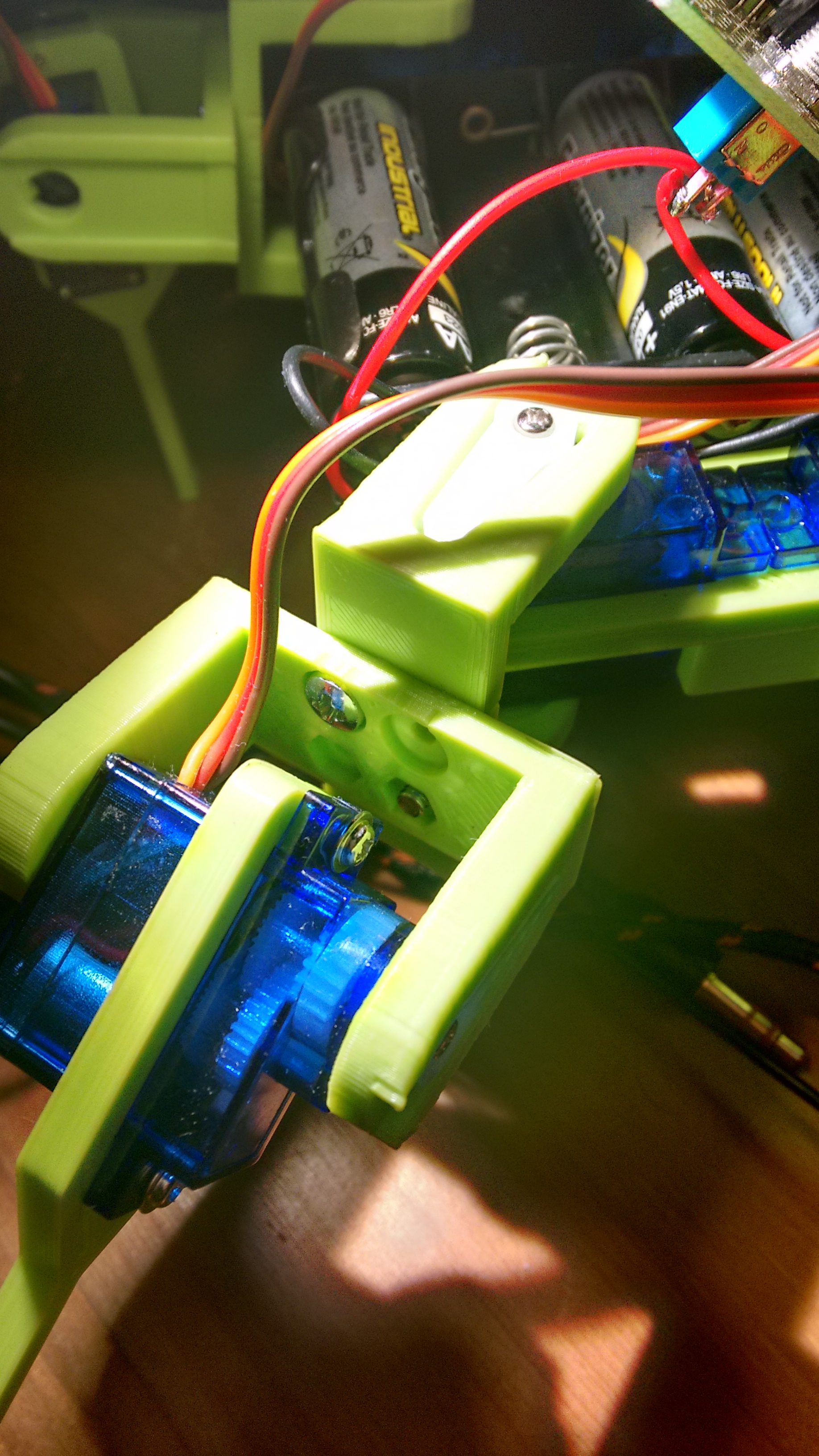
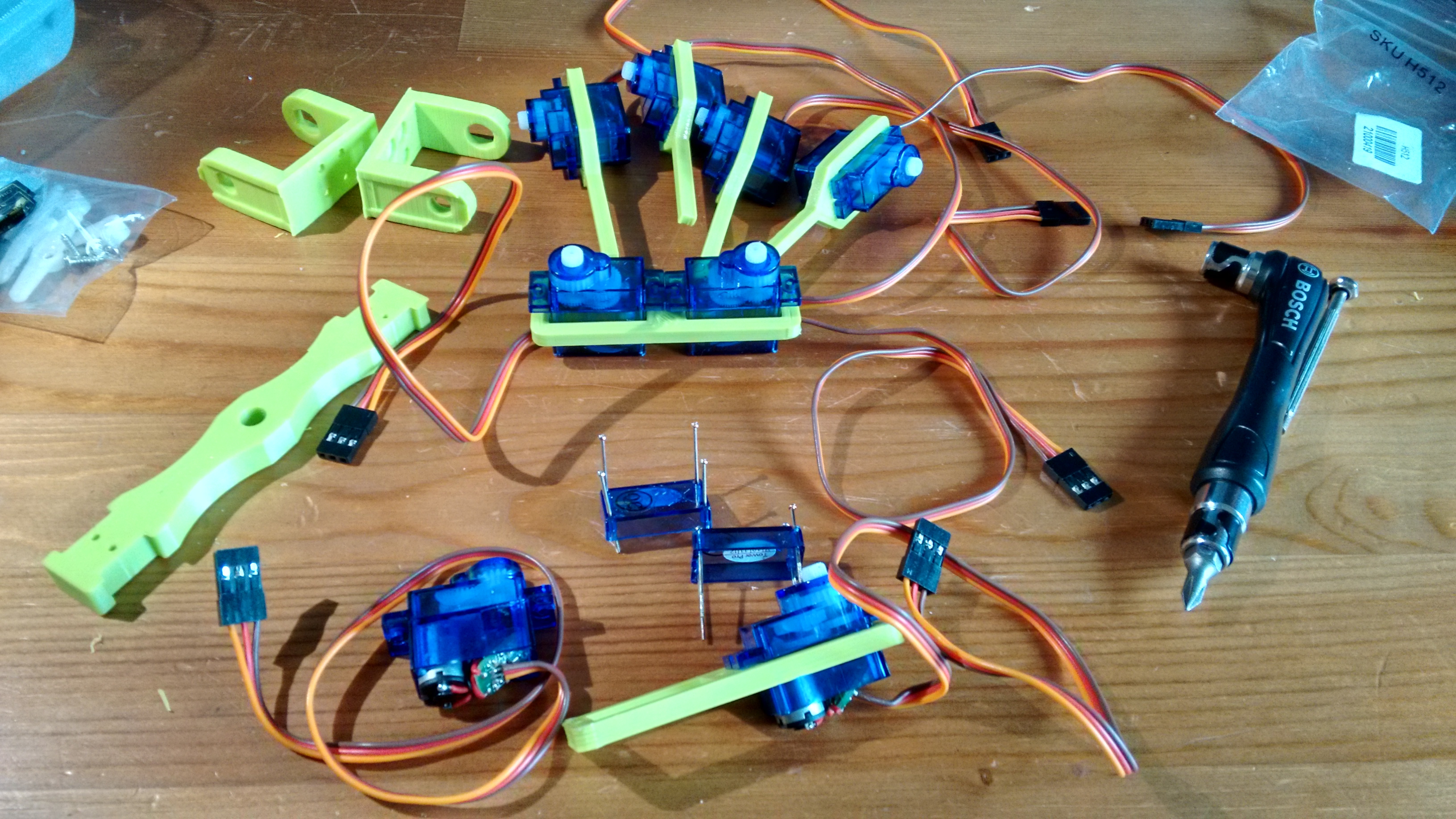
Cześć, oszlifowałem części, sprawdziłem czy serwa działają, bo z tymi częściami z Chin, nigdy nic nie wiadomo ( ͡° ͜ʖ ͡°)
Zamontowałem serwa w uchwytach. Przy okazji okazało się, że nie mam odpowiednich śrubek. Dlatego nie zdążyłem dziś wszystkiego zamontować.
http://imgur.com/zYA9xRe
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @qzer @PrawieJakBordo @
Zamontowałem serwa w uchwytach. Przy okazji okazało się, że nie mam odpowiednich śrubek. Dlatego nie zdążyłem dziś wszystkiego zamontować.
http://imgur.com/zYA9xRe
Wołam zainteresowanych: @StefanEm @WebSpider @trochejanusz @qzer @PrawieJakBordo @

źródło: comment_BY6UCM8lJtQGL8SpxjF1p9Hq4PYXlZiH.jpg
Pobierz@qzer: program będę pisał sam, lubię wiedzieć do czego służy każda linijka kodu ;)
Podasz link do tego gościa? Chętnie przejrzę jego ofertę. Pamiętaj, że dużo zależy od materiału i sposoby wypełnienia modelu. Przy wypełnieniu 20% też bym zapłacił 30 zł.
Podasz link do tego gościa? Chętnie przejrzę jego ofertę. Pamiętaj, że dużo zależy od materiału i sposoby wypełnienia modelu. Przy wypełnieniu 20% też bym zapłacił 30 zł.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Wrzucę filmik jak zacznie przynajmniej udawać, że utrzymuje równowagę.
Obudowa wydrukowana przez @FlameRunner
więcej zdjęć tutaj
#arduino #pikeboty #robotyka
źródło: comment_TsUii8GxkgklnA4V9AYPyLW1vRAjJgT0.jpg
Pobierz