
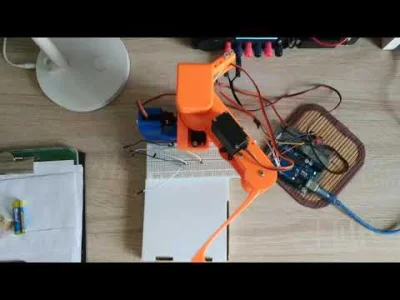
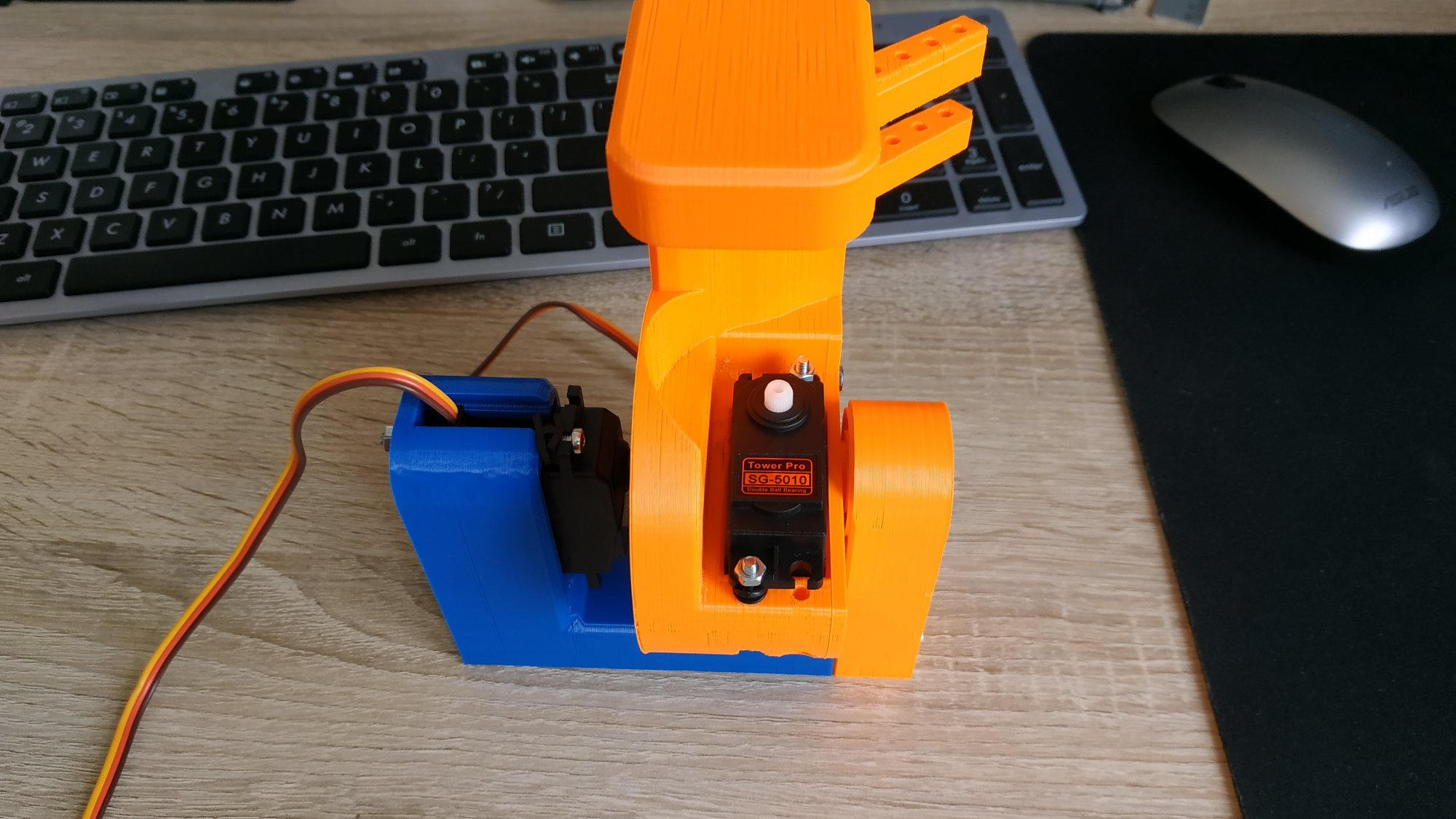
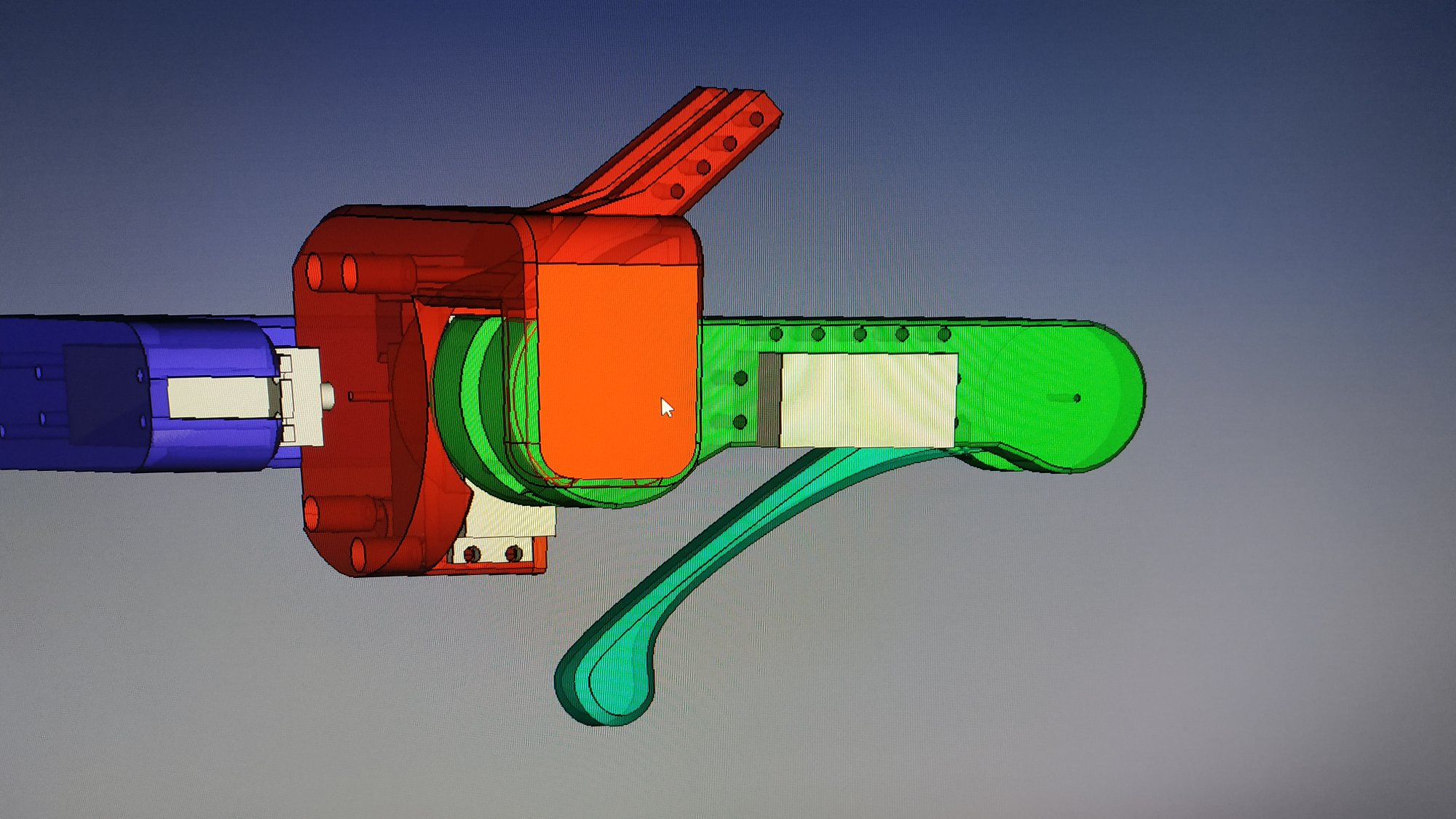
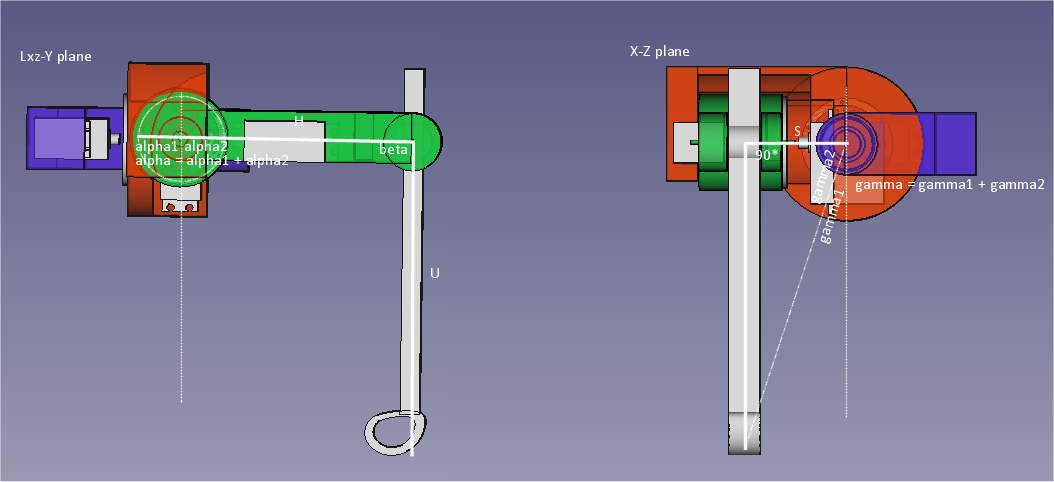
Czas na testy ruchów złożonych i odwrotnej kinematyki.
Muzyka dla śledzących #spacex
#robotyka #elektronika #diy #bostondynamics
Muzyka dla śledzących #spacex
#robotyka #elektronika #diy #bostondynamics
Wszystko
Wszystkie
Archiwum

Bawimy sie bronią...
z
Digit, dwunożny robot podobny do robota Atlas firmy Boston Dynamics, niosący pudełko.
z
Boston Dynamics, ulubiony startup każdego fana robotyki, wprowadza pierwszą maszynę do komercyjnego użytku. Do sprzedaży trafia popularny Spot, którego rozwój mogliśmy podziwiać już od 2015 roku. Przez lata robopies zyskał wielu entuzjastów, a...
z
źródło: comment_5vL6eocIhkI1YluTMJYdyB6DBzQxB4n6.jpg
Pobierz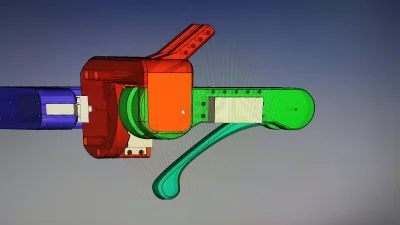
źródło: comment_gOZ6FCgXObBoWlnLGgWRmD4AYbYwVmwP.jpg
Pobierz
Do 5.7km/h, 90min na baterii, 14kg udźwigu, IP54, API do programowania własnych zachowań www.BostonDynamics.com/Spot
z
Nowe wideo od BostonDynamics.
z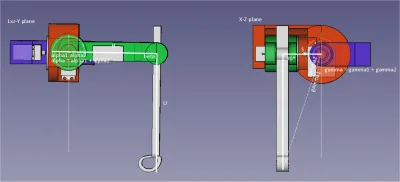
źródło: comment_sMhLJqpV9GsNQzggU3iYl0z7vnfQvaJN.jpg
Pobierz
Według zamysłu specjalistów, maszyna świetnie będzie sprawdzała się jako pomocnik przy niebezpiecznych dla ludzi misjach w kopalniach, platformach naftowych lub gazowych. Ma też znaleźć zastosowanie w akcjach ratowniczych po wystąpieniu naturalnych kataklizmów i misjach antyterrorystycznych.
z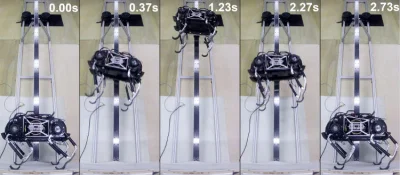
źródło: comment_Wmnm8xl4JDJ7gqNRvCfr90z4hXKALJxN.jpg
Pobierz
Krótka zajawka tego jakby firma Boston Dynamics wydała w latach 90 swojego robota ( ͡° ͜ʖ ͡°)
z













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ma ktos ten filmik z tego wykopaliska ? bo usuneli ( ͡° ͜ʖ ͡°)
#robotyka #bostondynamics