
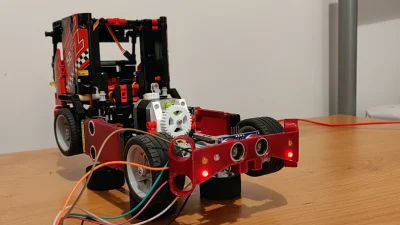
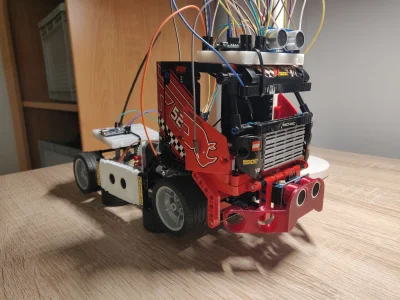
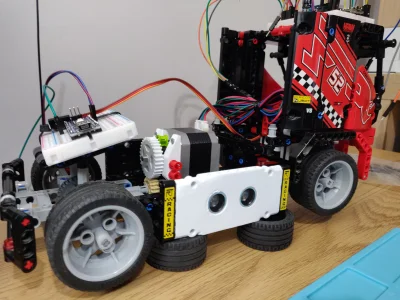
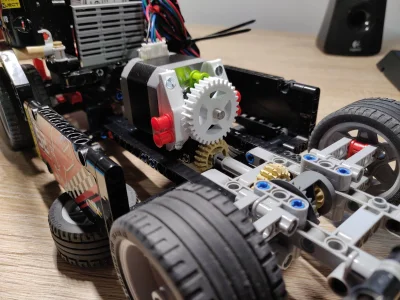
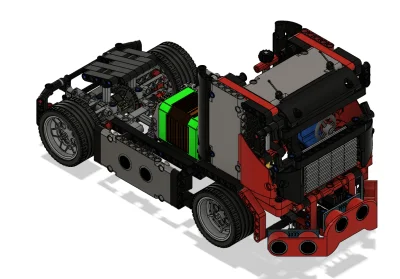
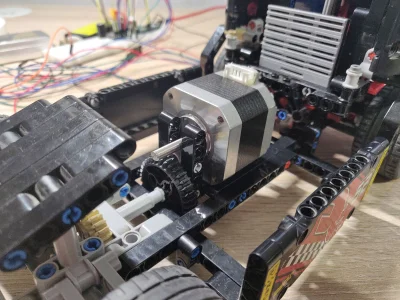
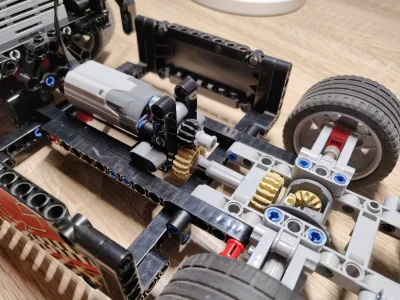
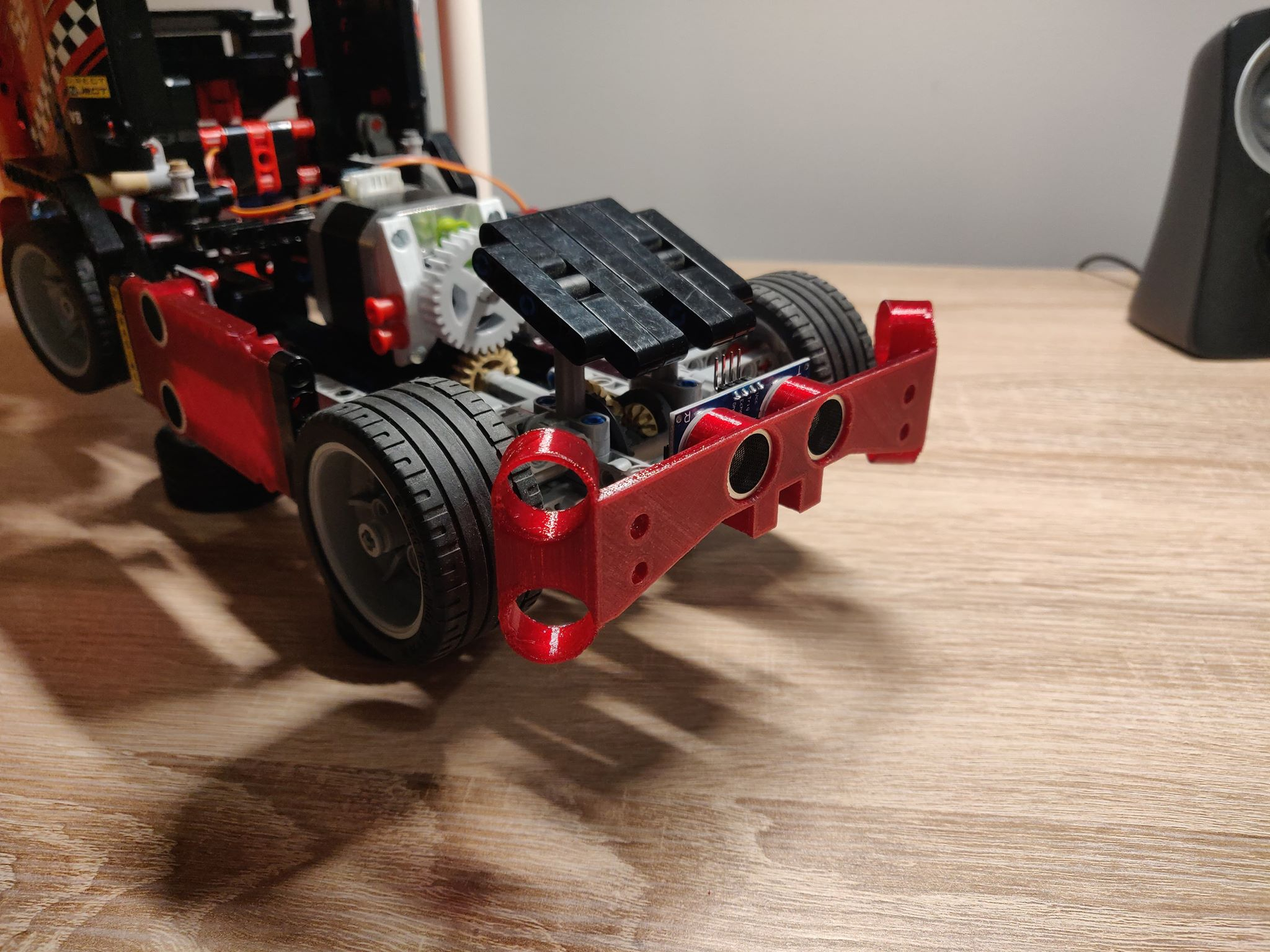
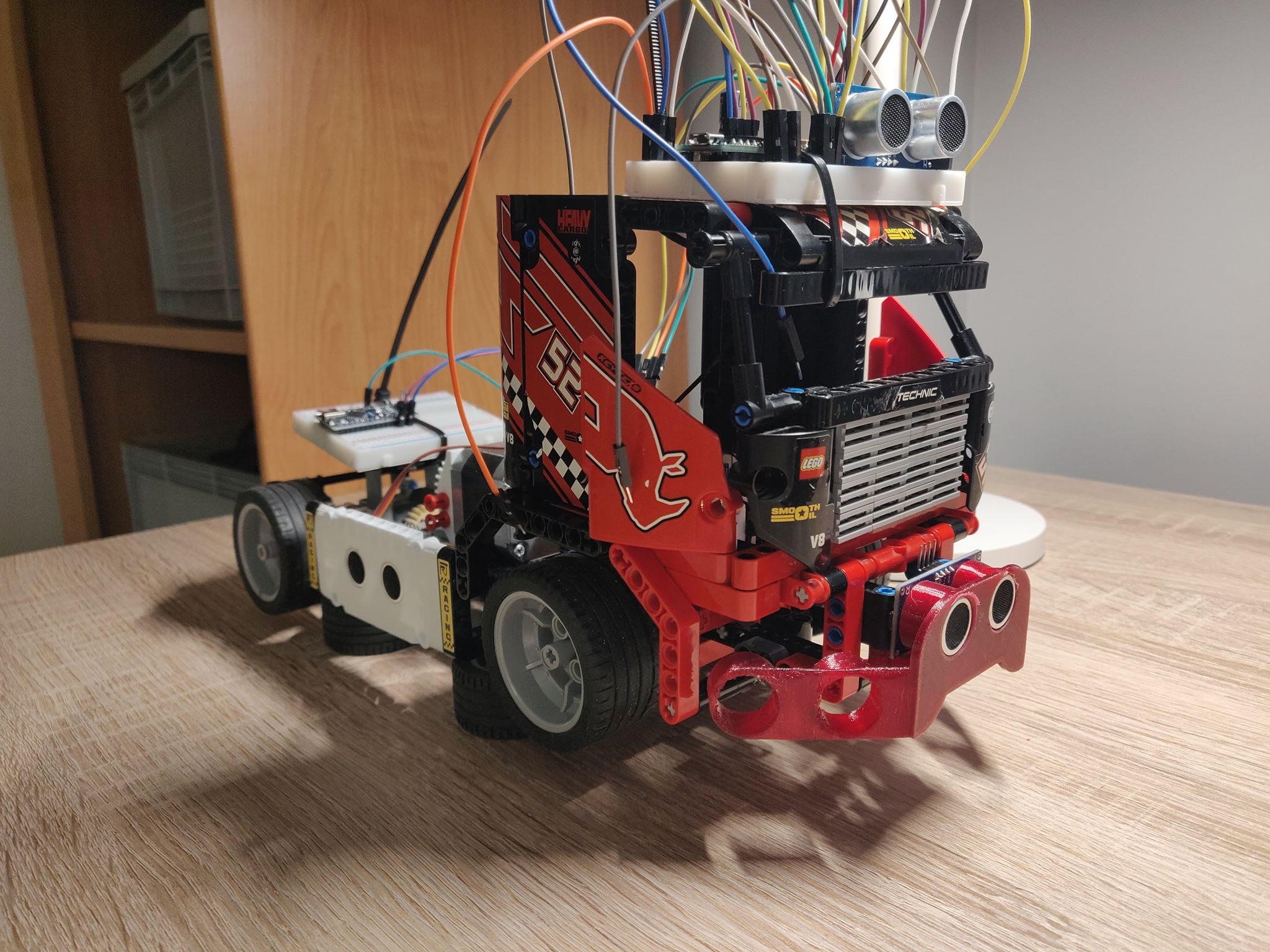
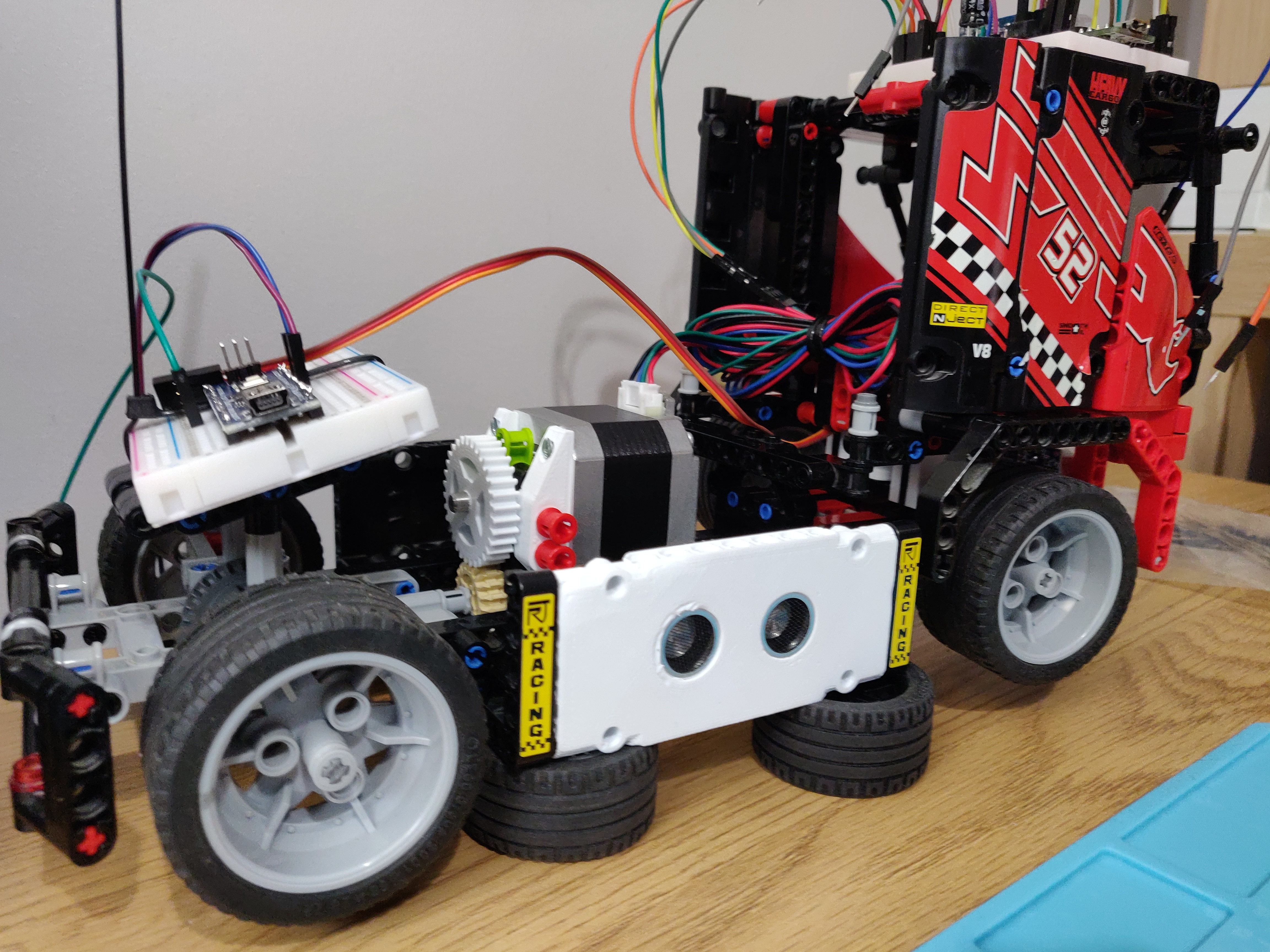
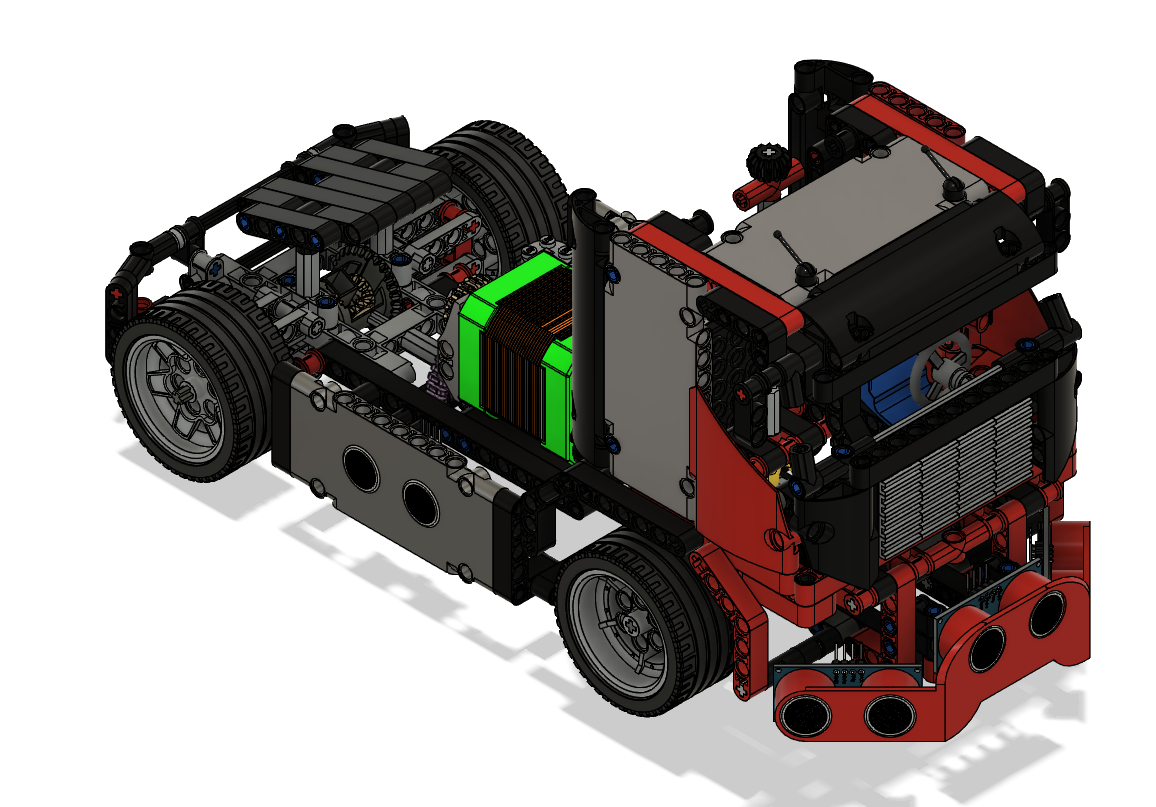
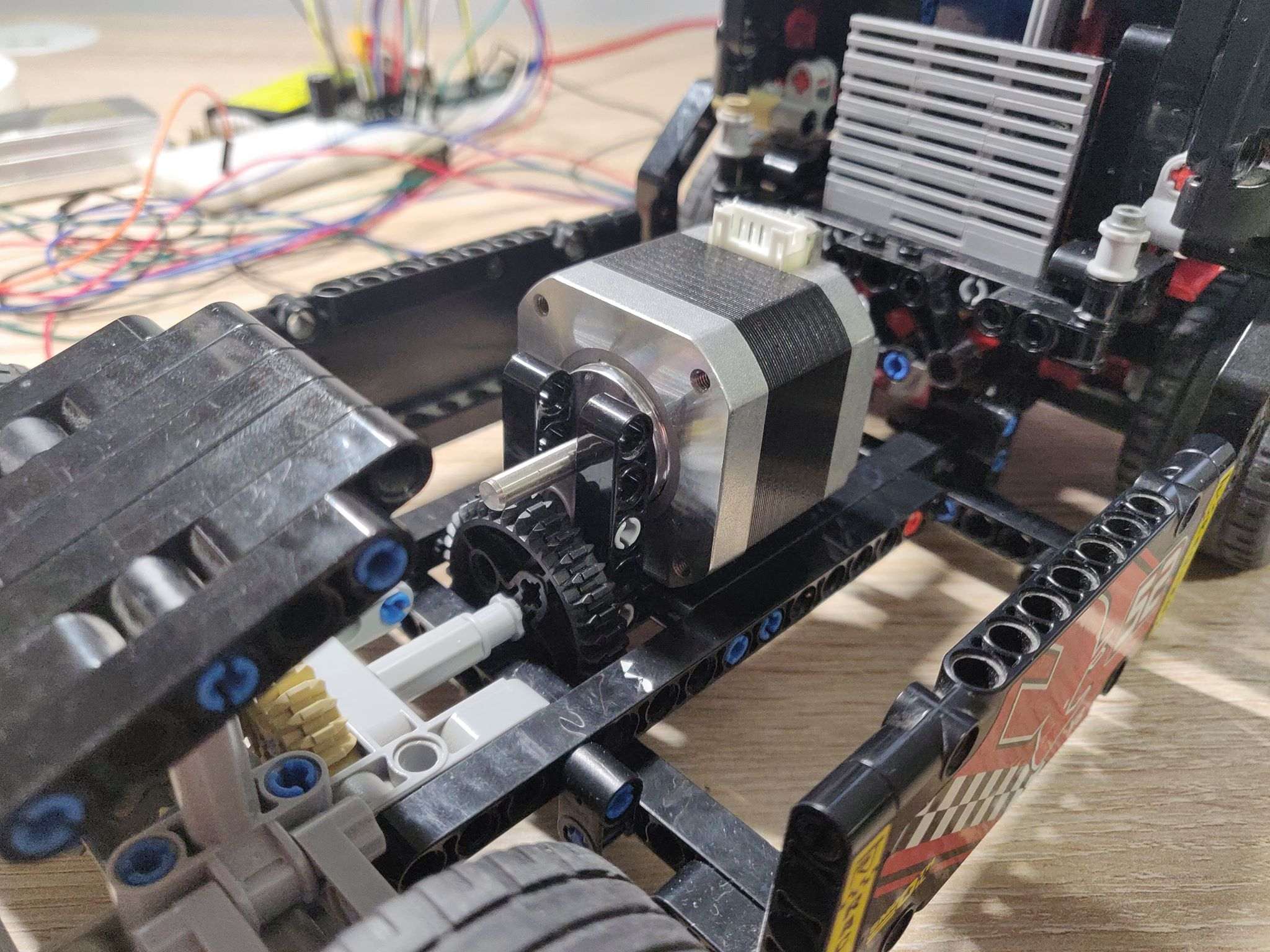
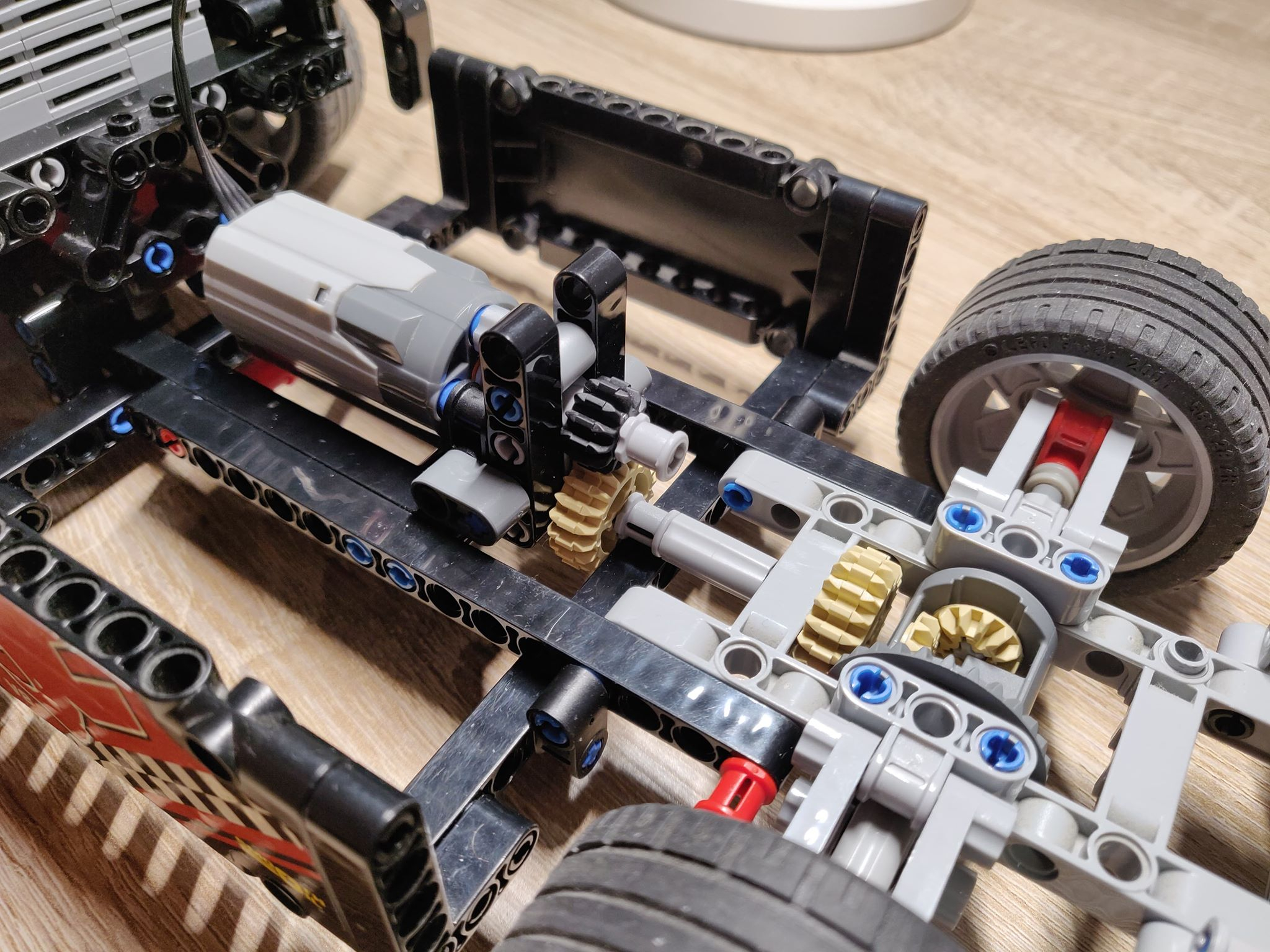
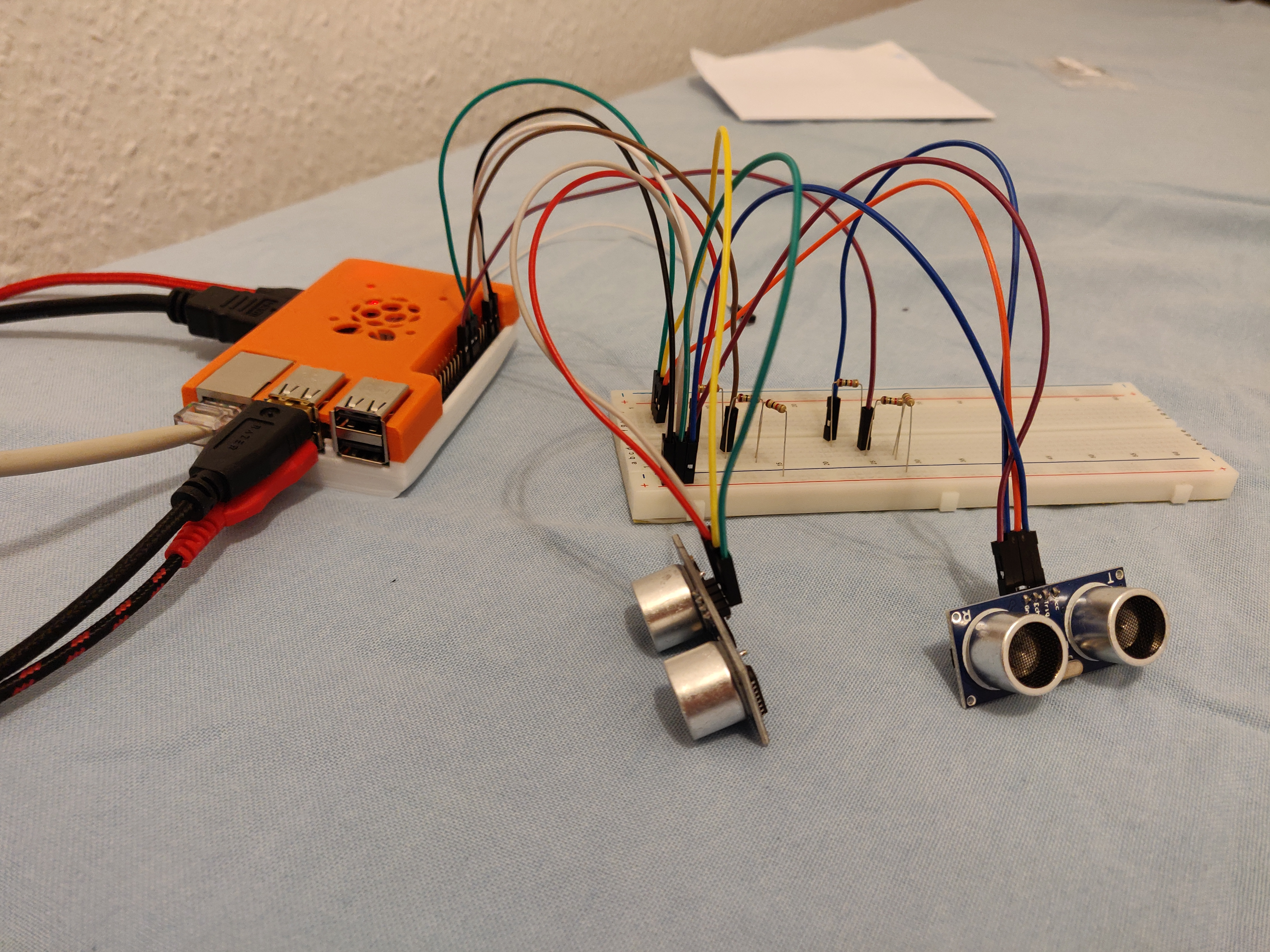
kończę powoli zderzak. zdecydowałem się na montaż świateł, coś czego nie planowałem ale takie detale jednak cieszą oko. w związku z montażem ledów muszę zmienić goldpiny na czujnikach z kątowych na pionowe by wszystko ładnie się zmieściło stąd nie są jeszcze umieszczone boczne. z przodu też jest oświetlenie, kierunki i normalne światła ale bez kabli jeszcze. planuje w weekend i następny tydzień wszystko podłączać
#malinoweauto
#druk3d #elektronika #majsterkowanie #arduino #diy #chwalesie
#malinoweauto
#druk3d #elektronika #majsterkowanie #arduino #diy #chwalesie





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
#malinoweauto
#elektronika #majsterkowanie #arduino #diy #chwalesie #lego